2 La donnée géographique dans R
Prérequis
C’est le premier chapitre pratique du livre. Il faut donc installer certains logiciels et les avoir un peu pratiqué. Vous devez avoir accès à un ordinateur sur lequel est installé R (version 4.2.0 ou supérieure). Nous vous recommandons vivement de ne pas vous contenter de lire le texte, mais également d’exécuter le code afin de renforcer vos compétences en géocomputation.
Pour garder une trace de votre progression, il est utile de créer un nouveau dossier sur votre ordinateur pour enregistrer au fur et à mesure vos notes dans des scripts R, vos sorties graphiques ou autres. Vous pouvez télécharger ou cloner le code source du livre en anglais à partir de github.com/robinlovelace/geocompr pour vous aider dans votre apprentissage. Nous vous recommandons vivement d’installer un environnement de développement intégré (IDE) tel que RStudio (recommandé pour la plupart des gens) ou VS Code)6
Si vous ne connaissez pas R, nous vous recommandons de suivre les ressources d’introduction à R telles que Hands on Programming with R de Garrett Grolemund ou Introduction to R de Claudia Engel avant de vous lancer dans ce livre.
Organisez votre travail (par exemple, avec des projets RStudio) et donnez à vos scripts des noms judicieux tels que 02-chapter.R pour documenter le code que vous écrivez au fur et à mesure de votre apprentissage.
Une fois confortable il est temps de tester un peu de code ! À moins que ces paquets ne soient déjà installés, la première chose à faire est d’installer les paquets R fondamentaux utilisés dans ce chapitre, à l’aide des commandes suivantes :7
install.packages("sf")
install.packages("terra")
install.packages("spData")
install.packages("spDataLarge", repos = "https://nowosad.r-universe.dev")Tous les paquets nécessaires pour reproduire la première partie du livre peuvent être installés via la commande suivante : remotes::install_github("geocompr/geocompkg").
Cette commande utilise la fonction install_packages() du package remotes pour installer le code source hébergé sur la plate-forme d’hébergement, de version et de collaboration de code GitHub.
La commande suivante installera toutes les dépendances nécessaires pour reproduire l’intégralité du livre (attention : cela peut prendre plusieurs minutes) : remotes::install_github("geocompr/geocompkg", dependencies = TRUE)
Les paquets nécessaires peuvent être “chargés” (techniquement, ils sont attachés) avec la fonction library() :
library(sf) # classes et fonctions pour les données vectorielles
#> Linking to GEOS 3.10.2, GDAL 3.4.1, PROJ 8.2.1; sf_use_s2() is TRUEConformément à la section ??, la sortie de library(sf) mentionne les versions des bibliothèques géographiques clés, comme GEOS, utilisées par ce paquet.
Les autres paquets installés contiennent des données qui seront utilisées dans le livre:
library(spData) # chargement de données geographiques
library(spDataLarge) # chargement de données geographiques plus volumineuses2.1 Introduction
Ce chapitre fournit de brèves explications sur les modèles fondamentaux des données géographiques : vecteur et raster. Nous présenterons la théorie qui sous-tend chaque modèle de données et les disciplines dans lesquelles ils prédominent, avant de démontrer leur mise en œuvre dans R.
Le modèle de données vectoriel représente le monde à l’aide de points, de lignes et de polygones. Ceux-ci ont des frontières discrètes et bien définies, ce qui signifie que les ensembles de données vectorielles ont généralement un haut niveau de précision (mais pas nécessairement d’exactitude, comme nous le verrons dans la section @ref(unités)). Le modèle de données raster divise la surface en pixel de taille constante. Les données rasters sont la base des images d’arrière-plan utilisées dans les cartes Web et constituent une source essentielle de données géographiques depuis les débuts de la photographie aérienne et des dispositifs de télédétection par satellite. Les rasters agrègent spatialement des informations à une résolution donnée. Ils maintiennent ainsi une consistance temporelle sur de grandes superficies (de nombreux jeux de données rasters sont disponibles à l’échelle planétaire).
Que faut-il utiliser ? La réponse dépend probablement de votre domaine d’application :
- Les données vectorielles ont tendance à dominer les sciences sociales parce que les constructions humaines ont tendance à avoir des frontières discrètes.
- Les données rasters dominent de nombreuses sciences de l’environnement en raison de la dépendance aux données de télédétection.
Il y a beaucoup de chevauchements dans certains domaines et les ensembles de données rasters et vectorielles peuvent être utilisés conjointement : les écologistes et les démographes, par exemple, utilisent couramment les deux. En outre, il est possible de les convertir (voir la section 6). Que votre travail mobilise plus un type de jeux de données, vectorielles ou rasters, il reste utile de comprendre leurs modèles de données sous-jacents pour bien les utiliser, comme nous le verrons dans les chapitres suivants. Ce livre utilise les paquets sf et terra pour travailler, respectivement, avec des données vectorielles et des jeux de données raster.
2.2 Données vectorielles
vector (notez la police monospace) dans R.
Le premier est un modèle de données, le second est une classe informatique de R tout comme le sont data.frame et matrix.
Il existe néanmoins un lien entre les deux : les coordonnées spatiales qui sont au cœur du modèle de données vectorielles géographiques peuvent être représentées en R à l´aide d´objets vector.
Le modèle de données géographiques vectorielles est basé sur des points situés dans un système de coordonnées de référence (CRS). Les points peuvent représenter des caractéristiques propres (par exemple, l’emplacement d’un arrêt de bus) ou être reliés entre eux pour former des géométries plus complexes telles que des lignes et des polygones. La plupart des géométries construites avec des points ne sont qu’en deux dimensions (les CRS tridimensionnels contiennent une valeur supplémentaire \(z\), représentant généralement la hauteur au-dessus du niveau de la mer).
Dans ce système, Londres, par exemple, peut être représentée par les coordonnées c(-0,1, 51,5).
Cela signifie que sa position est -0,1 degré est et 51,5 degrés nord par rapport au point d’origine.
Ce dernier se situe à 0 degré de longitude (le méridien d’origine) et à 0 degré de latitude (l’équateur) dans un CRS géographique (‘long/lat’) (Figure 2.1, panneau de gauche).
Cette même localisation pourrait également être approximée dans un SCR projeté avec des valeurs “Est/Nord” de c(530000, 180000) dans le British National Grid, ce qui signifie que Londres est située à 530 km Est et 180 km Nord de l’origine du SCR.
Ceci peut être vérifié visuellement : un peu plus de 5 “boîtes” — des zones carrées délimitées par les lignes de grille grises de 100 km de large — séparent le point représentant Londres de l’origine (Figure 2.1, panneau de droite).
L’emplacement de l’origine de la grille nationale, dans la mer au-delà de la péninsule du sud-ouest de l’Angleterre, garantit que la plupart des lieux du Royaume-Uni auront des valeurs positives en abscisse et ordonnée.8 Les CRS sont plus complexes, et seront abordées plus en détail dans les sections 2.4 et 7. Cependant pour les besoins de cette section, il suffit de savoir que les coordonnées consistent en deux nombres représentant la distance par rapport à un point d’origine, généralement dans les dimensions \(x\) puis \(y\).
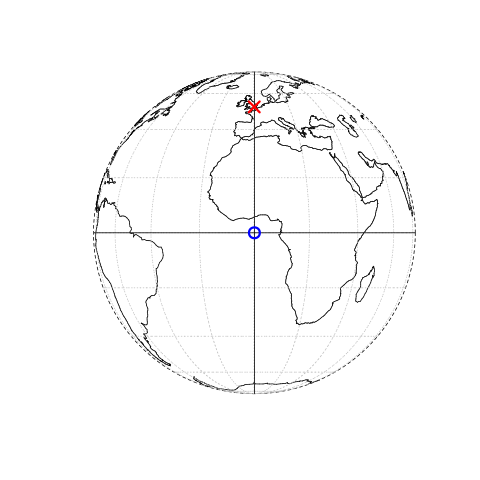
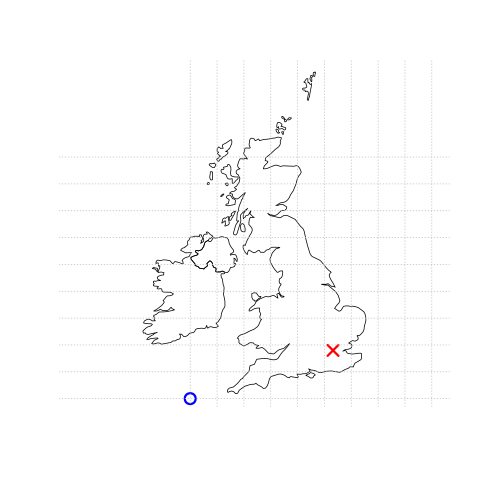
FIGURE 2.1: Représentation de données vectorielles (ponctuelles) dans laquelle l’emplacement de Londres (X rouge) est représenté par rapport à une origine (le cercle bleu). La carte de gauche représente un SCR géographique dont l’origine se situe à 0° de longitude et de latitude. Le graphique de droite représente un SCR projeté dont l’origine est située dans la mer à l’ouest de la péninsule du sud-ouest anglaise.
sf fournit des classes informatiques pour les données géographiques vectorielles ainsi qu’une interface en ligne de commande pour des bibliothèques de géocomputation de bas niveau :
- GDAL, pour la lecture, l’écriture et la manipulation d’une large gamme de formats de données géographiques, couverte dans le chapitre ??
- PROJ, une puissante bibliothèque pour les transformations de systèmes de coordonnées, qui sous-tend le chapitre 7
- GEOS, un moteur de géométrie euclidienne pour les opérations telles que le calcul des tampons et des centroïdes sur les données avec un SCR projeté, couvert dans le chapitre ??
- S2, un moteur de géométrie sphérique écrit en C++ développé par Google, via le paquet s2, couvert dans la section 2.2.9 ci-dessous et dans le chapitre 7.
Les informations concernant ces interfaces sont indiquées par sf lorsque que celui ci est chargé pour la première fois: via le message Linking to GEOS 3.8.0, GDAL 3.0.4, PROJ 6.3.1; sf_use_s2() is TRUE apparue en dessous de la commande library(sf) au tout début de ce chapitre. Ce message indique les versions des bibliothèques liées GEOS, GDAL et PROJ (chiffre pouvant varier au cours du temps et entre les ordinateurs) et si oui ou non l’interface avec S2 est activée.
Aujourd’hui, nous considérons que c’est un acquis, cependant, c’est grâce à l’intégration étroite entre les différentes bibliothèques géographiques qu’un travail de géocomputation reproductible est possible.
Une fonctionnalité intéressante de sf est que vous pouvez changer le moteur de géométrie par défaut utilisé sur les données non projetées : “Désactiver” S2 peut être fait avec la commande sf::sf_use_s2(FALSE), ce qui signifie que le moteur de géométrie euclidienne GEOS sera utilisé par défaut pour toutes les opérations de géométrie, y compris celles sur les données non projetées.
Comme nous le verrons dans la Section 2.2.9, la géométrie euclidienne, ou plane, est basée sur un espace à 2 dimensions.
Les moteurs de géométrie euclidienne tels que GEOS supposent des coordonnées “plates” (projetées), tandis que les moteurs de géométrie sphérique tels que S2 supposent des coordonnées non projetées (lon/lat).
Cette section présente les classes sf en préparation des chapitres suivants (les chapitres ?? et ?? couvrent respectivement l’interface GEOS et GDAL)
2.2.1 Une introduction aux Simple Features
Simple features ou “entités simples” est un Format ouvert développé et approuvé par l’Open Geospatial Consortium (OGC), une organisation à but non lucratif dont nous reviendrons sur les activités dans un chapitre ultérieur (section ??). Simple Features est un modèle de données hiérarchique qui représente un large éventail de types géométriques. Sur les 18 types géométriques pris en charge par la spécification, seuls 7 sont utilisés dans la grande majorité des recherches géographiques (voir Figure 2.2) ; ces types géométriques de base sont entièrement pris en charge par le paquet R sf (Pebesma 2018).9
FIGURE 2.2: Les types de Simple features pleinement disponibles dans sf.
sf peut représenter tous les types de géométrie vectorielle courants (les classes de données raster ne sont pas prises en charge par sf) : points, lignes, polygones et leurs versions “multi” respectives (qui regroupent les caractéristiques du même type en une seule caractéristique). sf prend également en charge les collections de géométrie, qui peuvent contenir plusieurs types de géométrie dans un seul objet. sf fournit la même fonctionnalité (et plus) que celle fournie précédemment dans trois packages — sp pour les classes de données (Pebesma and Bivand 2018), rgdal pour la lecture/écriture de données via une interface avec GDAL et PROJ (Bivand, Keitt, and Rowlingson 2018) et rgeos pour les opérations spatiales via une interface avec GEOS (Bivand and Rundel 2018).
Comme expliqué au chapitre 1, les paquets géographiques de R ont une longue histoire d’interfaçage avec des bibliothèques de niveau inférieur, et sf poursuit cette tradition avec une interface unifiée vers les versions récentes de GEOS pour les opérations de géométrie, la bibliothèque GDAL pour la lecture et l’écriture de fichiers de données géographiques, et la bibliothèque PROJ pour la représentation et la transformation des systèmes de référence de coordonnées projetées.
Grâce à s2,
“une interface avec la bibliothèque de géométrie sphérique de Google [s2] (https://s2geometry.io/), sf a également accès à des”mesures et opérations sur des géométries non planes” rapides et précises” (Bivand 2021).
Depuis la version 1.0.0 de sf, lancée en juin 2021, la fonctionnalité s2 est maintenant utilisée par défaut sur les géométries avec des systèmes de coordonnées géographiques (longitude/latitude), une caractéristique unique de sf qui diffère des bibliothèques spatiales ne prenant en charge que GEOS pour les opérations de géométrie, comme le paquet Python GeoPandas.
Nous aborderons s2 dans les chapitres suivants.
La capacité de sf à intégrer plusieurs bibliothèques puissantes pour la géoinformatique dans un seul cadre est une réalisation remarquable qui réduit le “coût d’entrée” dans le monde de l’analyse reproductible des données géographiques avec des bibliothèques performantes. La fonctionnalité de sf est bien documentée sur son site web à l’adresse [r-spatial.github.io/sf/] (https://r-spatial.github.io/sf/index.html) contient 7 vignettes. Celles-ci peuvent être visualisées hors ligne comme suit :
vignette(package = "sf") # Qu'elles sont les vignettes disponibles
vignette("sf1") # Une introduction à la bibliothèque Comme l’explique la première vignette, les objets de type simples features dans R sont stockés dans un tableau de données, les données géographiques occupant une colonne spéciale, généralement nommée “geom” ou “geometry”.
Nous allons utiliser le jeu de données world fourni par la bibliothèque spData, chargé au début de ce chapitre, pour montrer ce que sont les objets sf et comment ils fonctionnent.
world est un “tableau de données sf” contenant des colonnes spatiales et attributaires, dont les noms sont retournés par la fonction names() (la dernière colonne dans cet exemple contient les informations géographiques) :
class(world)
#> [1] "sf" "tbl_df" "tbl" "data.frame"
names(world)
#> [1] "iso_a2" "name_long" "continent" "region_un" "subregion" "type"
#> [7] "area_km2" "pop" "lifeExp" "gdpPercap" "geom"Le contenu de cette colonne geom donne aux objets sf leurs propriétés spatiales : world$geom est une ‘colonne de type liste’ qui contient toutes les coordonnées des polygones du pays.
Les objets sf peuvent être tracés rapidement avec la fonction de base de R, plot() ;
la commande suivante crée la figure 2.3.
plot(world)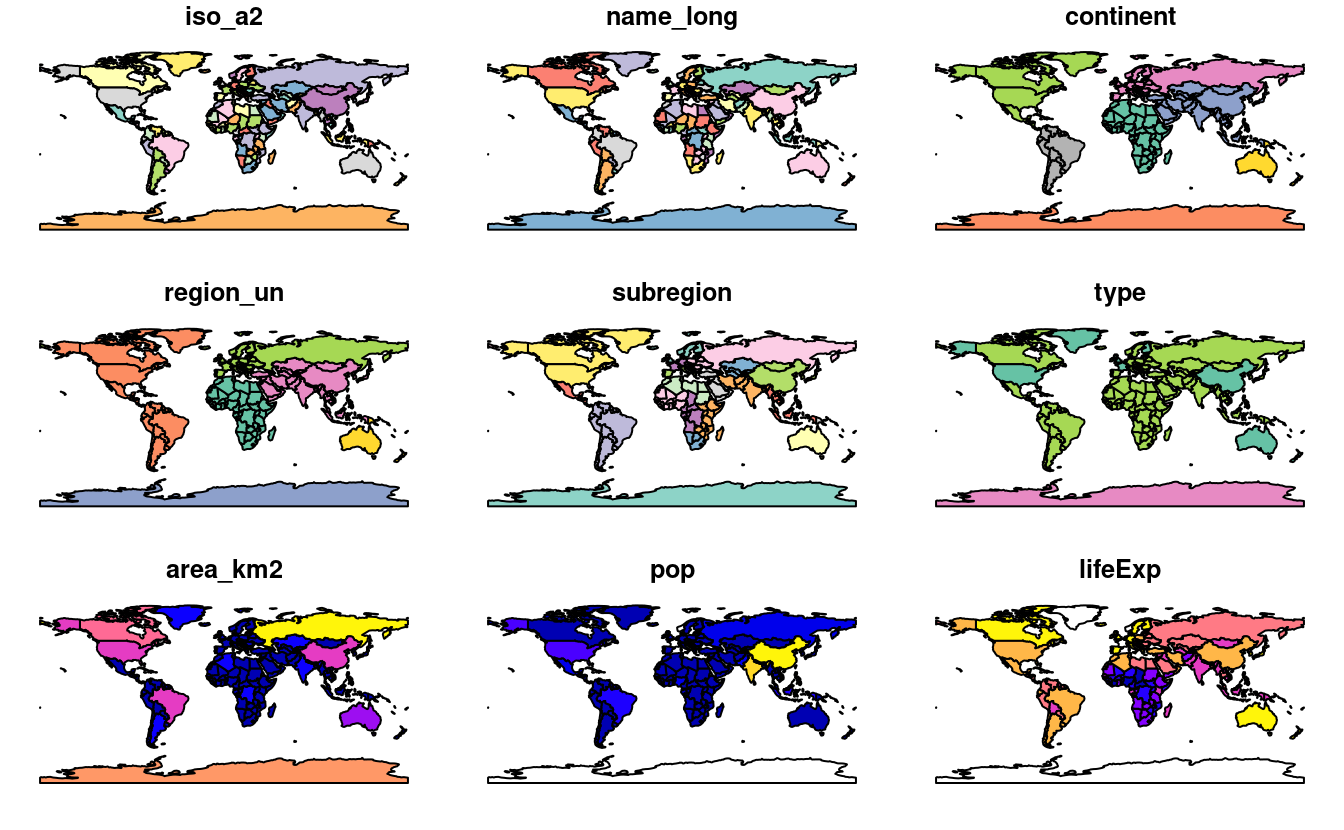
FIGURE 2.3: Cartes du monde utilisant le paquet sf, avec une dimension pour chaque attribut.
Notez qu’au lieu de créer une seule carte par défaut pour les objets géographiques, comme le font la plupart des programmes SIG, la fonction plot() sur des objets sf retourne une carte pour chaque variable du jeux de données.
Ce comportement peut être utile pour explorer la distribution spatiale de différentes variables et est abordé plus en détail dans la section 2.2.3.
Plus largement, traiter les objets géographiques comme des tableaux de données classiques avec des propriétés spatiales présente de nombreux avantages, surtout si vous avez déjà l’habitude de travailler avec des tableaux de données.
Par exemple, la fonction très pratique summary(), fournit un aperçu utile des variables de l’objet world.
summary(world["lifeExp"])
#> lifeExp geom
#> Min. :50.6 MULTIPOLYGON :177
#> 1st Qu.:65.0 epsg:4326 : 0
#> Median :72.9 +proj=long...: 0
#> Mean :70.9
#> 3rd Qu.:76.8
#> Max. :83.6
#> NA's :10Bien que nous n’ayons sélectionné qu’une seule variable pour la commande summary(), elle produit également un rapport sur la géométrie.
Cela démontre le comportement “permanent” des colonnes de type géométrie des objets sf, cela signifie que la géométrie est conservée à moins que l’utilisateur ne la supprime délibérément, comme nous le verrons dans la Section ??.
Le résultat fournit un résumé rapide des données spatiales et non spatiales contenues dans world : l’espérance de vie moyenne est de 71 ans (allant de moins de 51 ans à plus de 83 ans avec une médiane de 73 ans) pour tous les pays.
MULTIPOLYGON dans le résumé ci-dessus fait référence au type de géométrie des éléments (pays) dans l´objet world.
Cette représentation est nécessaire pour les pays comportant des îles comme l´Indonésie et la Grèce.
Les autres types de géométrie sont décrits dans la section 2.2.4.
Il est important d’examiner de plus près le comportement de base et le contenu de cet objet simple feature, que l’on peut utilement considérer comme un “spatial data frames”.
Les objets sf sont faciles à extraire: le code ci-dessous extrait ses deux premières lignes et trois premières colonnes de world.
La sortie montre deux différences majeures par rapport à un data.frame standard : l’inclusion de données géographiques supplémentaires (geometry type, dimension, bbox et les informations SCR -epsg (SRID),proj4string) ainsi que la présence d'une colonnegeometry, ici nomméegeom` :
world_mini = world[1:2, 1:3]
world_mini
#> Simple feature collection with 2 features and 3 fields
#> Geometry type: MULTIPOLYGON
#> Dimension: XY
#> Bounding box: xmin: -180 ymin: -18.3 xmax: 180 ymax: -0.95
#> Geodetic CRS: WGS 84
#> iso_a2 name_long continent geom
#> 1 FJ Fiji Oceania MULTIPOLYGON (((-180 -16.6,...
#> 2 TZ Tanzania Africa MULTIPOLYGON (((33.9 -0.95,...Tout cela peut sembler assez complexe, surtout pour un système de classes qui est censé être simple. Cependant, il y a de bonnes raisons d’organiser les choses de cette façon et d’utiliser sf.
Avant de décrire chaque type de géométrie géré par le paquet sf, il est utile de prendre un peu de recul pour comprendre les éléments constitutifs des objets de type sf.
La section 2.2.5 montre comment les objets simples features sont des tableau de données, avec des colonnes géométriques spéciales.
Ces colonnes spatiales sont souvent appelées geom ou geometry : ainsi world$geom fait référence à l’élément spatial de l’objet world décrit plus haut.
Ces colonnes géométriques sont des “colonnes de type liste” de la classe sfc (voir la section 2.2.7).
Puis, à leur tour, les objets sfc sont composés d’un ou plusieurs objets de la classe sfg : des géométries d’entités simples que nous décriverons dans la section 2.2.6.
Pour comprendre comment fonctionnent les composantes spatiales des entités simples, il est essentiel de comprendre comment leurs géométries sont prises en comptes.
C’est pourquoi nous couvrirons chacun des types de géométrie d’entités simples actuellement pris en charge dans la section 2.2.4 puis nous continuerons en montrant comment ils peuvent être représentés dans R avec des objets sf, formés à la base d’objets sfg et sfc.
Le morceau de code précédent utilise `=` pour créer un nouvel objet appelé `world_mini` dans la commande `world_mini = world[1:2, 1:3]`.
C´est ce qu´on appelle une affectation.
Une commande équivalente pour obtenir le même résultat est `world_mini <- world[1:2, 1:3]`.
Bien que l´affectation par flèche soit plus couramment utilisée, nous utilisons l´affectation par égalité parce qu´elle est légèrement plus rapide à taper et plus facile à enseigner en raison de sa compatibilité avec les langages couramment utilisés tels que Python et JavaScript.
L´utilisation de l´un ou l´autre est une question de préférence, tant que vous êtes cohérent (des paquets tels que **styler** peuvent être utilisés pour changer de style).2.2.2 Pourquoi simple features?
Les simple features ou entités simples sont un modèle de données largement utilisé qui sous-tend les structures de données de nombreuses applications SIG, notamment QGIS et PostGIS. L’un des principaux avantages de cette approche est que l’utilisation du modèle de données garantit que votre travail est transférable à d’autres configurations, par exemple l’importation et l’exportation vers des bases de données spatiales.
Une question plus spécifique du point de vue de R est “pourquoi utiliser le paquet sf alors que sp est déjà éprouvé” ? Il existe de nombreuses raisons (liées notamment aux avantages du modèle des entités simples) :
- lecture et écriture rapides des données ;
- amélioration des performances de représentation graphique ;
- les objets sf peuvent être traités comme des tableaux de données dans la plupart des opérations ;
- les noms des fonctions sf sont relativement cohérents et intuitifs (tous commencent par
st_) ; - les fonctions sf peuvent être combinées à l’aide de l’opérateur
|>et fonctionnent bien avec la collection tidyverse des paquets R.
L’intégration de sf pour les paquets tidyverse est illustrée avec la fonction de lecture des données géographiques vectorisées: read_sf().
Au contraire de la fonction st_read() qui va retourner les attributs dans les classes de base R data.frame (et affiche un message de compte rendu plus complet qui dans l’extrait de code ci dessous a été omis) la fonction read_sf() va retourner un tidyverse tibble.
Vous en trouvez la démonstration ci-dessous (voir la section ?? sur la lecture et l’écriture des données géographiques vectorielles avec R) :
world_dfr = st_read(system.file("shapes/world.shp", package = "spData"))
#> Reading layer `world' from data source
#> `/usr/local/lib/R/site-library/spData/shapes/world.shp' using driver `ESRI Shapefile'
#> Simple feature collection with 177 features and 10 fields
#> Geometry type: MULTIPOLYGON
#> Dimension: XY
#> Bounding box: xmin: -180 ymin: -89.9 xmax: 180 ymax: 83.6
#> Geodetic CRS: WGS 84
world_tbl = read_sf(system.file("shapes/world.shp", package = "spData"))
class(world_dfr)
#> [1] "sf" "data.frame"
class(world_tbl)
#> [1] "sf" "tbl_df" "tbl" "data.frame"Comme illusté dans le Chapitre 3, montrant la manipulation d’objets `sf avec le tidyverse, sf est désormais la bibliothèquee de référence pour l’analyse des données vectorielles spatiales dans R (sans oublier l’écosystème des paquets spatstat qui fournit de nombreuses fonctions pour les statistiques spatiales). De nombreux paquets populaires reposent sur sf, comme le montre l’augmentation de sa popularité en termes de nombre de téléchargements par jour, comme indiqué dans la section 1.4 du chapitre précédent. La transition de paquets et de chaînes de processus reposant sur les anciens paquets rgeos et rgdal prends du temps (Bivand 2021), mais le processus a été acceleré par le sentiments d’urgence par les messages indiquant qu’ils “seraient indisponibles à partir de fin 2023”. Cela signifie que quiconque utilisant encore ces paquets se doit de “passer aux fonctions de sf/stars/terra pour utiliser GDAL et PROJ le plus rapidement possible.”.
En d’autres termes, sf est à l’épreuve du futur mais sp ne l’est pas.
Pour les workflow qui dépendent de l’ancienne classe Spatial, les objets sf peuvent être convertis depuis et vers la classe Spatial du paquet sp comme suit :
2.2.3 Réalisation rapide de cartes
Des premiers jets de cartes peuvent être crées dans sf avec plot().
Par défaut, cela crée un graphique avec de multiple encarts, un encart pour chaque variable de l’objet, comme illustré dans le panneau de gauche de la Figure 2.4.
Une légende ou “clé” avec une couleur continue est produite si l’objet à tracer a une seule variable (voir l’encart de droite).
Les couleurs peuvent également être définies avec l’argument col =, bien que cela ne permette pas de créer une palette continue ou une légende.
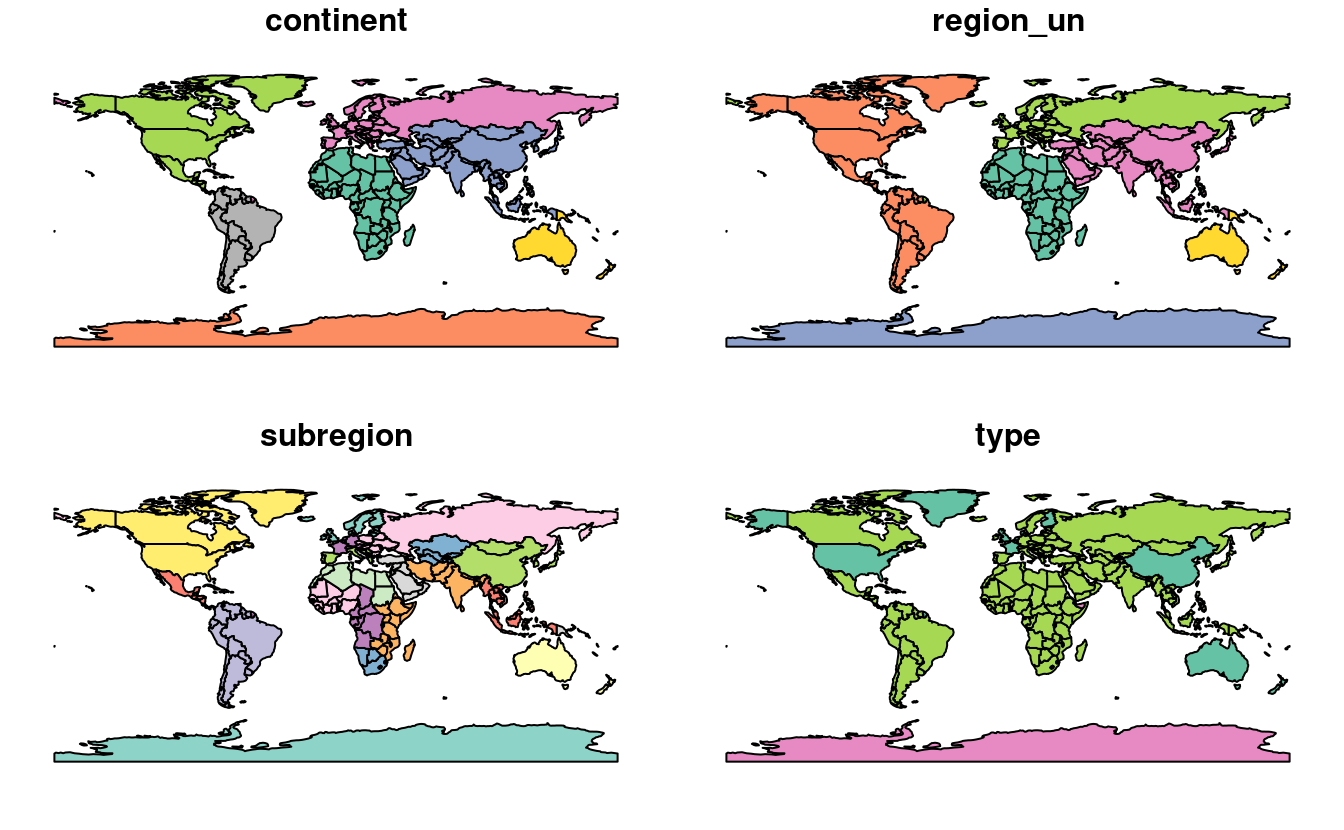
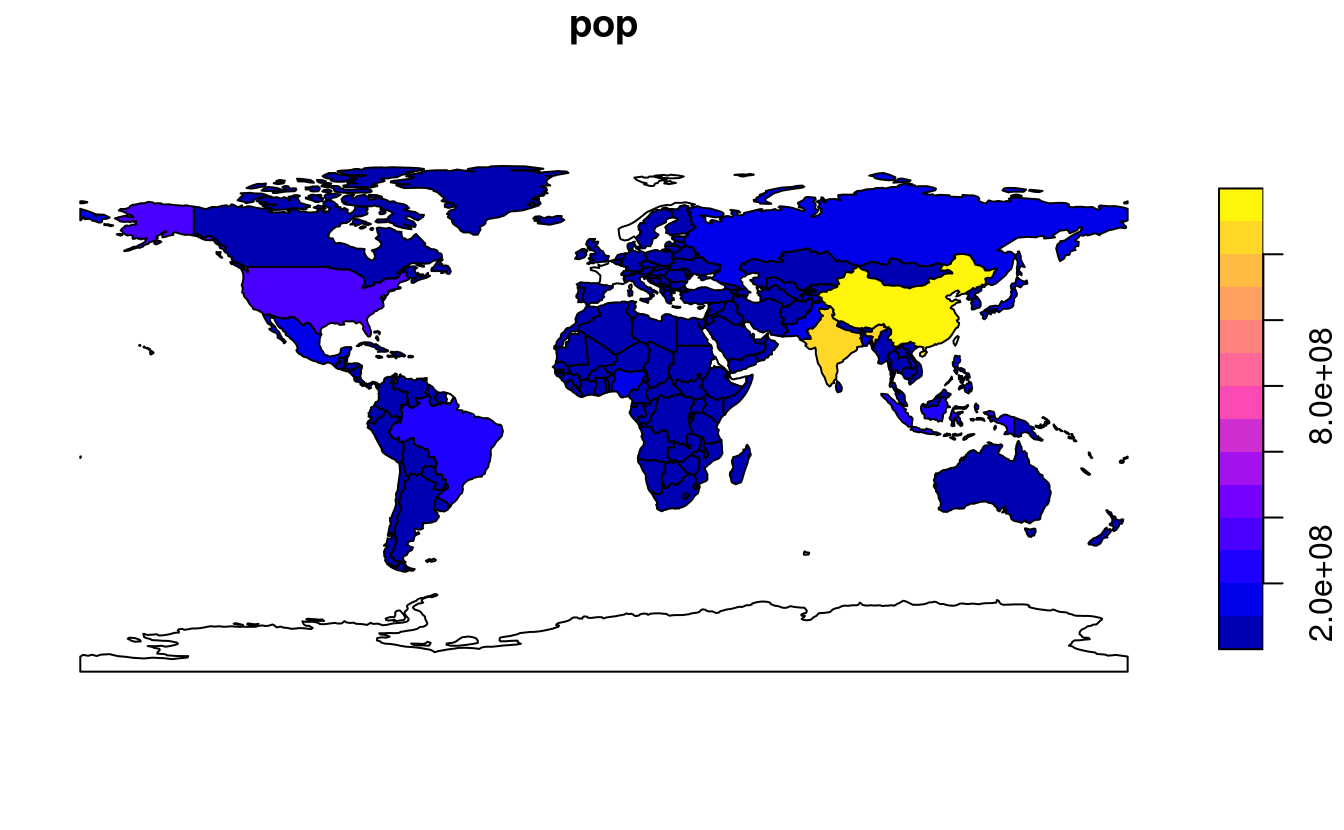
FIGURE 2.4: Cartographie avec sf, avec plusieurs variables (gauche) ou une seule (droite).
Les graphiques sont ajoutés en tant que couches aux images existantes en ajoutant dans la fonction l’argument add = TRUE.10
Pour illustrer cela et donner un avant-goût du contenu des chapitres 3 et 4 sur les attributs et les opérations sur les données spatiales, l’extrait de code suivant filtre et combine des pays d’Asie en un seul élément :
world_asia = world[world$continent == "Asia", ]
asia = st_union(world_asia)Ainsi, nous pouvons maintenant dessiner le continent asiatique sur une carte du monde.
Notez que le premier graphique ne doit avoir qu’un seul encart pour que add = TRUE fonctionne.
Si le premier graphique a une légende, reset = FALSE doit être utilisé (résultat non montré) :
L’ajout de couches de cette manière peut être utilisé pour vérifier la correspondance géographique entre les couches :
la fonction plot() est rapide à exécuter et nécessite peu de lignes de code, mais ne permet pas de créer des cartes interactives avec une large gamme d’options.
Pour la réalisation de cartes plus poussées, nous recommandons l’utilisation de paquets de visualisation spécifiques tels que tmap (voir le chapitre ??).
Il y a plusieurs façons de modifier les cartes avec la méthode plot() de sf.
Comme sf étend les méthodes de base de R, les arguments de plot() tels que main = (qui spécifie le titre de la carte) fonctionnent avec les objets sf (voir ?graphics::plot et ?par).11
La figure 2.5 illustre cette flexibilité en superposant sur une carte du monde des cercles dont les diamètres (définis avec l’argument cex =) représentent les populations des pays.
Une version non projetée de cette figure peut être créée avec les commandes suivantes (voir les exercices à la fin de ce chapitre et le script 02-contplot.R 2.5):
plot(world["continent"], reset = FALSE)
cex = sqrt(world$pop) / 10000
world_cents = st_centroid(world, of_largest = TRUE)
plot(st_geometry(world_cents), add = TRUE, cex = cex)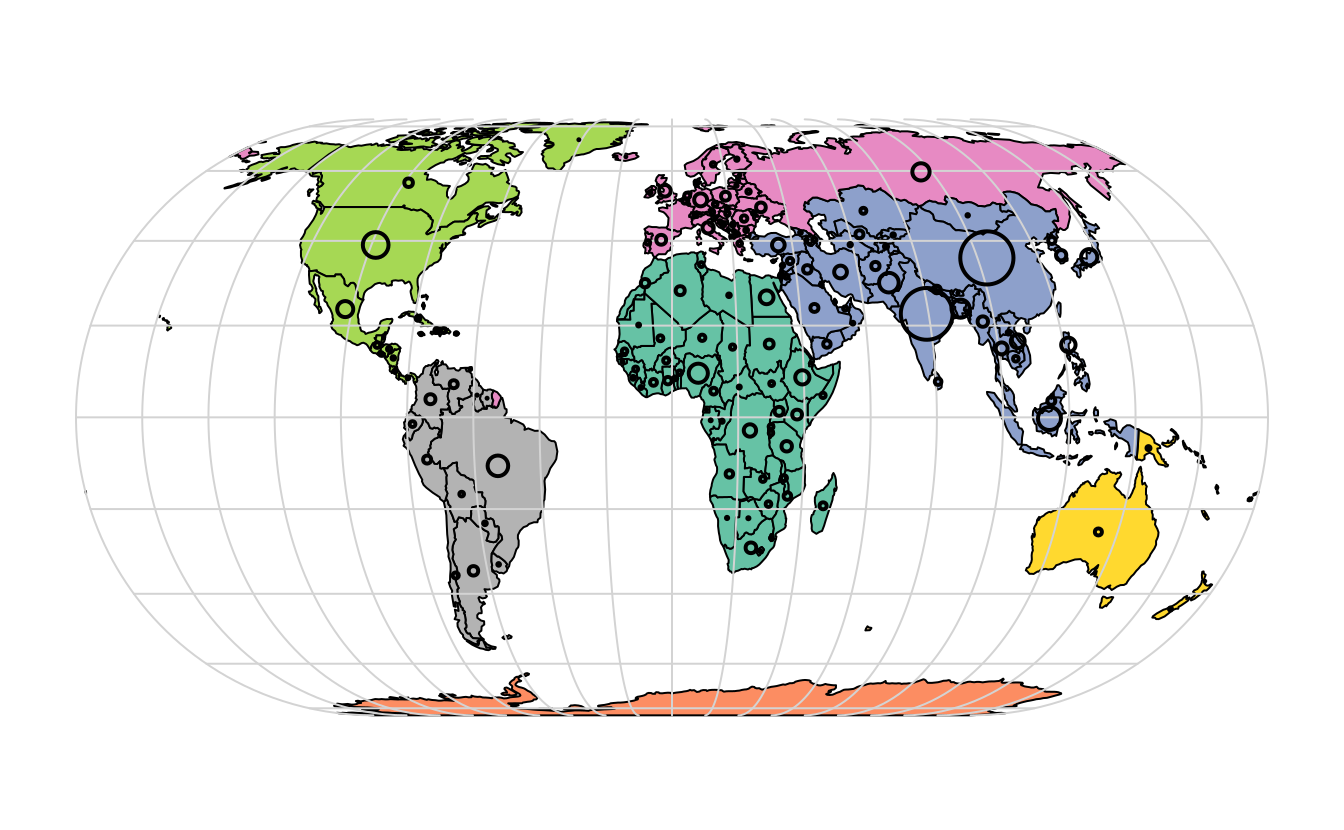
FIGURE 2.5: Pays coloriés par continent et leur population en 2015 (cercles proportionnels à la population).
Le code ci-dessus utilise la fonction st_centroid() pour convertir un type de géométrie (polygones) en un autre (points) (voir chapitre ??), dont la représentation varie en fonction de l’argument cex.
La méthode plot de sf possède également des arguments spécifiques aux données géographiques. expandBB, par exemple, peut être utilisé pour dessiner un objet sf dans son contexte :
elle prend un vecteur de quatre nombres qui étend la boîte de délimitation de la carte par rapport à zéro en suivant l’ordre : bas, gauche, haut, droite.
Dans le programme suivant, ce paramètre est utilisé pour représenter l’Inde et ses gigantesques voisins asiatiques, en mettant l’accent sur la Chine à l’est 2.6 (voir les ci-dessous sur l’ajout de texte aux graphiques):12
india = world[world$name_long == "India", ]
plot(st_geometry(india), expandBB = c(0, 0.2, 0.1, 1), col = "gray", lwd = 3)
plot(world_asia[0], add = TRUE)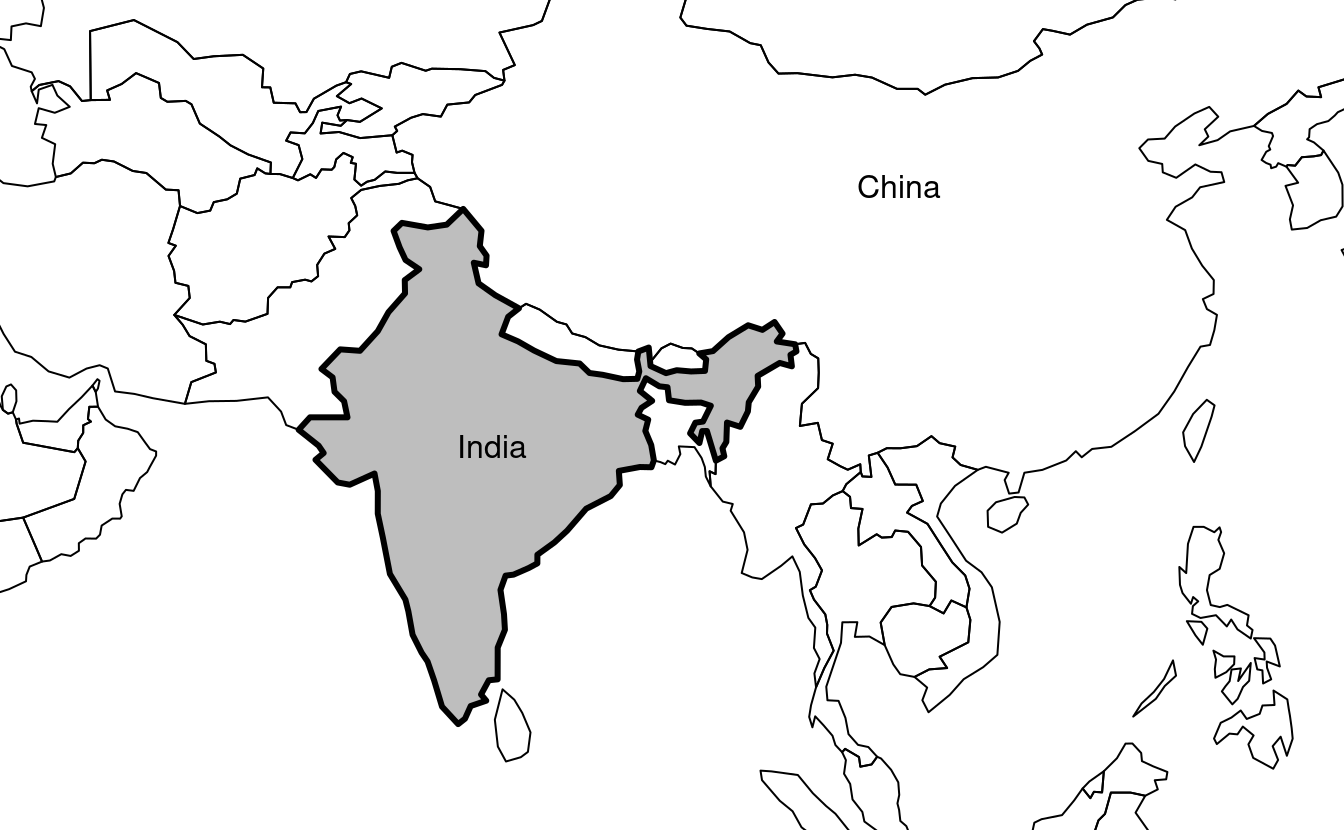
FIGURE 2.6: L’Inde et ses pays voisins, exemple d’utilisation du paramètre expandBB.
Notez l’utilisation de lwddans le code afin de renforcer l’Inde.
La section ?? vous équipera d’autres techniques de visualisation pour représenter une gamme de types de géométrie.
2.2.4 Les types de géométries
Les géométries sont les éléments de base des éntités simples.
Ces derniers peuvent prendre dans R l’un des 18 types de géométrie pris en charge par le paquet sf.
Dans ce chapitre, nous nous concentrerons sur les sept types les plus couramment utilisés : POINT, LINESTRING, POLYGON, MULTIPOINT, MULTILINESTRING, MULTIPOLYGON et GEOMETRYCOLLECTION.
La liste complète des types d’éléments possibles est disponible dans le manuel de PostGIS.
En général, le well-known binary (WKB) ou le well-known text (WKT) sont les codages standard pour les géométries simples. Les WKB sont généralement représentés par des chaînes hexadécimales facilement lisibles par les ordinateurs. C’est pourquoi les SIG et les bases de données spatiales l’utilisent pour transférer et stocker des objets géométriques. Le WKT, quant à lui, est une description de balisage textuel lisible par l’homme pour des éntités simples. Les deux formats sont échangeables, et si nous en présentons un, nous choisirons naturellement la représentation WKT.
La base de chaque type de géométrie est le point.
Un point est simplement une coordonnée dans un espace 2D, 3D ou 4D (cf. vignette("sf1") pour plus d’informations). Un exemple est disponible sur le second panneau de la figure 2.7:
POINT (5 2)
Une linestring, ligne, est une séquence de points avec une ligne droite reliant ces points, par exemple (cf. le panneau central de la figure 2.7) :
LINESTRING (1 5, 4 4, 4 1, 2 2, 3 2)
Un polygone est une séquence de points qui forment un anneau fermé, sans intersection. Fermé signifie que le premier et le dernier point d’un polygone ont les mêmes coordonnées (cf. le panneau de droite de la figure 2.7).13
- Polygone sans anneau intérieur:
POLYGON ((1 5, 2 2, 4 1, 4 4, 1 5))
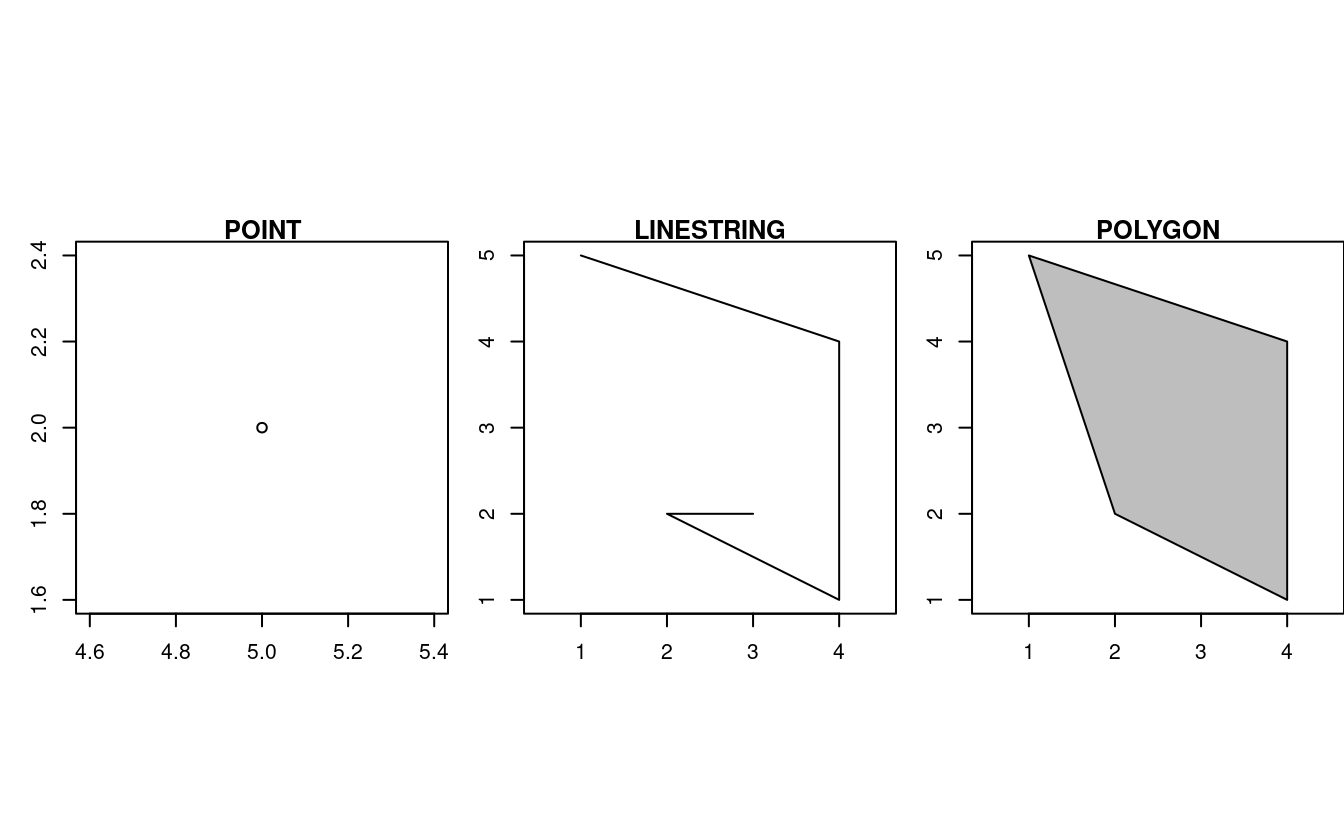
FIGURE 2.7: Exemple de géometries de point, ligne et polygone.
Jusqu’à présent, nous avons créé des géométries avec une seule entité géométrique par élément. Toutefois, sf permet également l’existence de plusieurs géométries au sein d’une même entité (d’où le terme “collection de géométries”) en utilisant la version “multi” de chaque type de géométrie :
- Multipoint:
MULTIPOINT (5 2, 1 3, 3 4, 3 2) - Multilinestring:
MULTILINESTRING ((1 5, 4 4, 4 1, 2 2, 3 2), (1 2, 2 4)) - Multipolygon:
MULTIPOLYGON (((1 5, 2 2, 4 1, 4 4, 1 5), (0 2, 1 2, 1 3, 0 3, 0 2)))
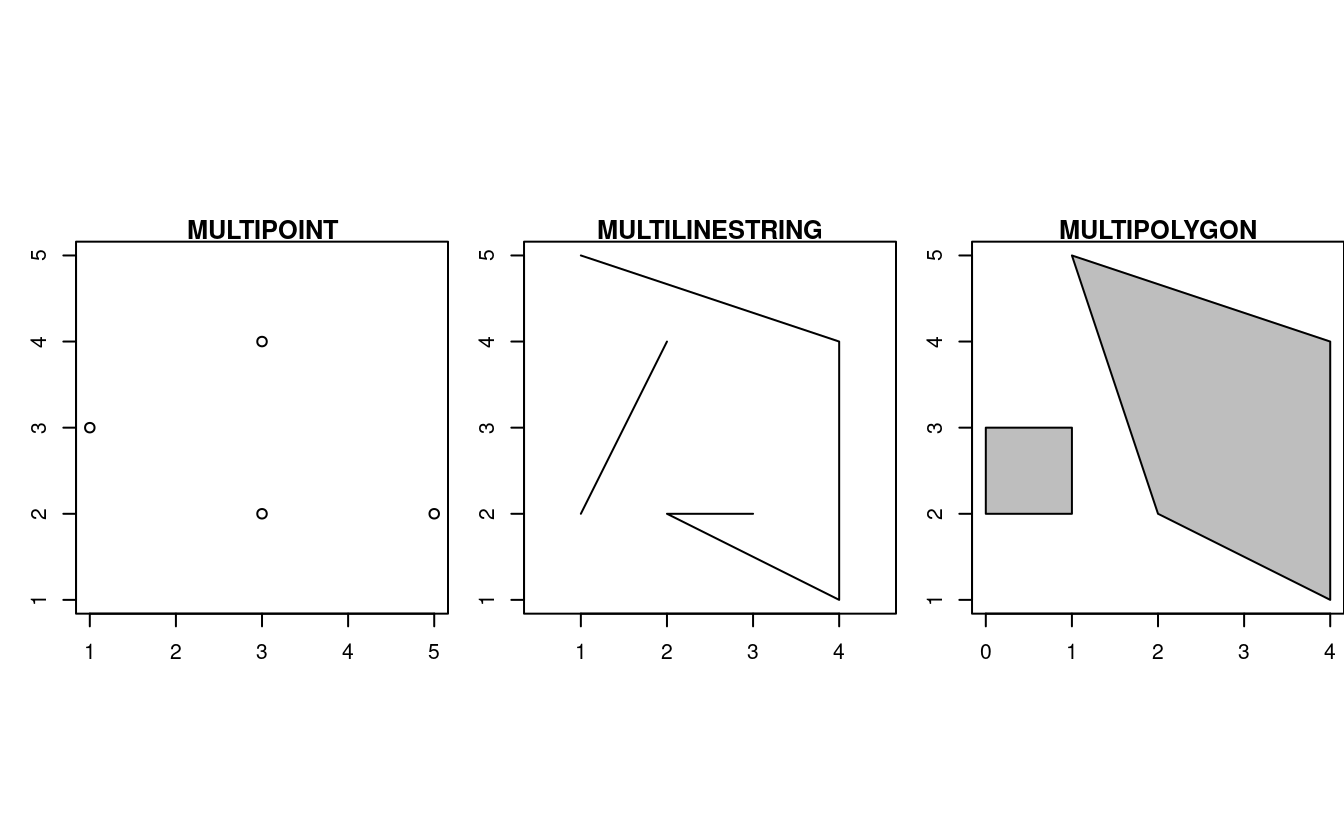
FIGURE 2.8: Examples de multi* geometries.
Enfin, une collection de géométries peut contenir n’importe quelle combinaison de géométries, y compris des (multi)points et des lignes (voir figure 2.9) :
- Geometry collection:
GEOMETRYCOLLECTION (MULTIPOINT (5 2, 1 3, 3 4, 3 2), LINESTRING (1 5, 4 4, 4 1, 2 2, 3 2))
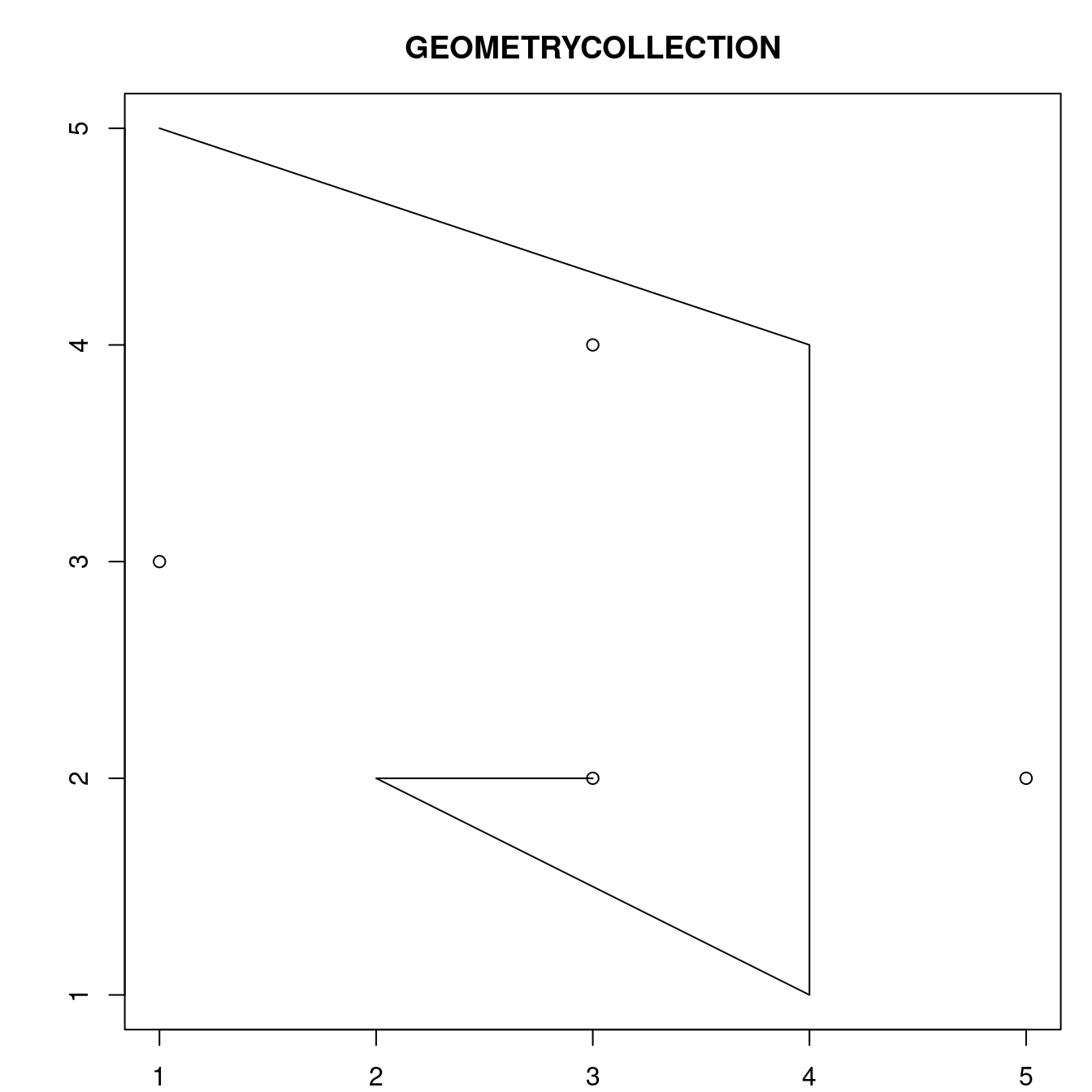
FIGURE 2.9: Exemple de collection de géometrie.
2.2.5 La classe sf
Les Simple features ou entités simples sont composés de deux parties principales : les géométries et les attributs non géographiques.
La figure 2.10 montre comment un objet sf est créé – les géométries proviennent d’un objet sfc, tandis que les attributs sont pris dans un data.frame ou un tibble.
Les sections 2.2.6 et 2.2.7 reprennent la création de géometries sf à partir de rien.

FIGURE 2.10: Différentes étapes de construction des objets sf.
Les attributs non géographiques permettent la représentation du nom de l’entité ou d’autres attributs, mesures, appartenance à des groupes et autres.
Pour l’illustrer nous allons représenter une température de 25°C à Londres le 21 juin 2017.
Cet exemple à une géométrie (les coordonnées) et trois attributs de trois classes différentes (le nom, la température et la date).14
Les objets de la classe sf représentent de telles données en combinant les attributs (data.frame) avec la colonne de géométrie simple feature (sfc).
Ils sont créés avec st_sf(), comme l’illustre le code ci-dessous, créant l’exemple londonien :
lnd_point = st_point(c(0.1, 51.5)) # objet sfg
lnd_geom = st_sfc(lnd_point, crs = 4326) # objet sfc
lnd_attrib = data.frame( # objet data.frame
name = "London",
temperature = 25,
date = as.Date("2017-06-21")
)
lnd_sf = st_sf(lnd_attrib, geometry = lnd_geom) # objet sfQue s’est-il passé ? Premièrement, les coordonnés ont été utilisées pour créer la simple feature geometry (sfg).
Deuxièmement, la géométrie a été convertie en une colonne de type simple feature (sfc), avec un SCR.
Troisièmement, les attributs ont été stockés dans un data.frame, qui a été combiné avec l’objet sfc avec st_sf().
Le résultat est un objet sf, comme montré ci-dessous (une partie de la sortie de code est omise) :
lnd_sf
#> Simple feature collection with 1 features and 3 fields
#> ...
#> name temperature date geometry
#> 1 London 25 2017-06-21 POINT (0.1 51.5)
class(lnd_sf)
#> [1] "sf" "data.frame"Le résultat montre que les objets sf ont en fait deux classes informatiques, sf et data.frame.
Les entités simples sont simplement des tableaux de données mais avec un attribut spatial stocké dans une colonne de type liste, souvent nommée geometry, comme décrit dans la section ??.
Cette dualité est au coeur du concept d’éntités simple:
la plupart du temps un objet sf peut être traité comme un data.frame et se comporté comme tel.
Les entités simples sont, par essence, des tableaux de données avec une extension spatiale.
2.2.6 Simple feature geometries (sfg)
La classe sfg représente les différents types de géométrie des éntités simples dans R : point, ligne, polygone (et leurs équivalents “multi”, comme les multipoints) ou collection de géométries.
En général, la tâche fastidieuse de création de géométries vous est épargnée car vous pouvez simplement importer un fichier spatial déjà existant.
Cependant, il existe un ensemble de fonctions permettant de créer des objets géométriques simple feature (sfg) à partir de zéro si nécessaire.
Les noms de ces fonctions sont simples et cohérents, ils commencent tous par le préfixe st_ et se terminent par le nom du type de géométrie en lettres minuscules :
- Un point :
st_point() - Une ligne :
st_linestring() - Un polygone:
st_polygon() - Un multipoint:
st_multipoint() - Une multiligne :
st_multilinestring() - Un multipolygone :
st_multipolygon() - Une collection de géométries :
st_geometrycollection()
Les objets sfg peuvent être créés à partir de trois de types de données de R:
- Un vecteur numérique: un point unique
- Un matrice: un ensemble de points, où chaque ligne représente un point, un multipoint ou une ligne
- Une liste: une collection d’objets comme des matrices, des multilignes ou des collections de géométries.
La fonction st_point() crée un point à partir de vecteurs numériques :
st_point(c(5, 2)) # point en XY
#> POINT (5 2)
st_point(c(5, 2, 3)) # point en XYZ
#> POINT Z (5 2 3)
st_point(c(5, 2, 1), dim = "XYM") # point en XYM
#> POINT M (5 2 1)
st_point(c(5, 2, 3, 1)) # point en XYZM
#> POINT ZM (5 2 3 1)Les sorties montrent que les types de points XY (coordonnées 2D), XYZ (coordonnées 3D) et XYZM (3D avec une variable supplémentaire, généralement la précision de mesure) sont créés à partir de vecteurs de longueur 2, 3 et 4, respectivement.
Le type XYM doit être spécifié en utilisant l’argument dim (qui est l’abréviation de dimension).
En revanche, vous devez utiliser des matrices dans le cas des objets multipoints (st_multipoint()) et ligne (st_linestring()) :
# la fonction rbind simplifie la création de matrices
## MULTIPOINT
multipoint_matrix = rbind(c(5, 2), c(1, 3), c(3, 4), c(3, 2))
st_multipoint(multipoint_matrix)
#> MULTIPOINT ((5 2), (1 3), (3 4), (3 2))
## LIGNE
linestring_matrix = rbind(c(1, 5), c(4, 4), c(4, 1), c(2, 2), c(3, 2))
st_linestring(linestring_matrix)
#> LINESTRING (1 5, 4 4, 4 1, 2 2, 3 2)Enfin, vous devez utiliser les listes pour la création de multilignes, de (multi-)polygones et de collections de géométries :
## POLYGONE
polygon_list = list(rbind(c(1, 5), c(2, 2), c(4, 1), c(4, 4), c(1, 5)))
st_polygon(polygon_list)
#> POLYGON ((1 5, 2 2, 4 1, 4 4, 1 5))
## POLYGONE avec un trou
polygon_border = rbind(c(1, 5), c(2, 2), c(4, 1), c(4, 4), c(1, 5))
polygon_hole = rbind(c(2, 4), c(3, 4), c(3, 3), c(2, 3), c(2, 4))
polygon_with_hole_list = list(polygon_border, polygon_hole)
st_polygon(polygon_with_hole_list)
#> POLYGON ((1 5, 2 2, 4 1, 4 4, 1 5), (2 4, 3 4, 3 3, 2 3, 2 4))
## MULTILIGNE
multilinestring_list = list(rbind(c(1, 5), c(4, 4), c(4, 1), c(2, 2), c(3, 2)),
rbind(c(1, 2), c(2, 4)))
st_multilinestring((multilinestring_list))
#> MULTILINESTRING ((1 5, 4 4, 4 1, 2 2, 3 2), (1 2, 2 4))
## MULTIPOLYGONE
multipolygon_list = list(list(rbind(c(1, 5), c(2, 2), c(4, 1), c(4, 4), c(1, 5))),
list(rbind(c(0, 2), c(1, 2), c(1, 3), c(0, 3), c(0, 2))))
st_multipolygon(multipolygon_list)
#> MULTIPOLYGON (((1 5, 2 2, 4 1, 4 4, 1 5)), ((0 2, 1 2, 1 3, 0 3, 0 2)))
## COLLECTIONS DE GEOMETRIES
geometrycollection_list = list(st_multipoint(multipoint_matrix),
st_linestring(linestring_matrix))
st_geometrycollection(geometrycollection_list)
#> GEOMETRYCOLLECTION (MULTIPOINT (5 2, 1 3, 3 4, 3 2),
#> LINESTRING (1 5, 4 4, 4 1, 2 2, 3 2))2.2.7 Simple feature columns (sfc)
Un objet sfg ne contient qu’un seul élément géométrique simple feature.
Une colonne de géométrie simple feature (sfc) est une liste d’objets sfg, qui peut en outre contenir des informations sur le système de référence des coordonnées utilisé.
Par exemple, pour combiner deux entités simples en un seul objet avec deux entités, nous pouvons utiliser la fonction st_sfc().
C’est important car sfc va correspondre à la colonne de géométrie dans les tableaux de données sf :
# POINT sfc
point1 = st_point(c(5, 2))
point2 = st_point(c(1, 3))
points_sfc = st_sfc(point1, point2)
points_sfc
#> Geometry set for 2 features
#> Geometry type: POINT
#> Dimension: XY
#> Bounding box: xmin: 1 ymin: 2 xmax: 5 ymax: 3
#> CRS: NA
#> POINT (5 2)
#> POINT (1 3)Dans la plupart des cas, un objet sfc contient des objets du même type géométrique.
Par conséquent, lorsque nous convertissons des objets sfg de type polygone en une colonne géométrique simple feature, nous obtenons également un objet sfc de type polygone, ce qui peut être vérifié avec st_geometry_type().
De même, une colonne géométrique de multilignes donnera un objet sfc de type multiligne :
# sfc POLYGON
polygon_list1 = list(rbind(c(1, 5), c(2, 2), c(4, 1), c(4, 4), c(1, 5)))
polygon1 = st_polygon(polygon_list1)
polygon_list2 = list(rbind(c(0, 2), c(1, 2), c(1, 3), c(0, 3), c(0, 2)))
polygon2 = st_polygon(polygon_list2)
polygon_sfc = st_sfc(polygon1, polygon2)
st_geometry_type(polygon_sfc)
#> [1] POLYGON POLYGON
#> 18 Levels: GEOMETRY POINT LINESTRING POLYGON MULTIPOINT ... TRIANGLE
# sfc MULTILINESTRING
multilinestring_list1 = list(rbind(c(1, 5), c(4, 4), c(4, 1), c(2, 2), c(3, 2)),
rbind(c(1, 2), c(2, 4)))
multilinestring1 = st_multilinestring((multilinestring_list1))
multilinestring_list2 = list(rbind(c(2, 9), c(7, 9), c(5, 6), c(4, 7), c(2, 7)),
rbind(c(1, 7), c(3, 8)))
multilinestring2 = st_multilinestring((multilinestring_list2))
multilinestring_sfc = st_sfc(multilinestring1, multilinestring2)
st_geometry_type(multilinestring_sfc)
#> [1] MULTILINESTRING MULTILINESTRING
#> 18 Levels: GEOMETRY POINT LINESTRING POLYGON MULTIPOINT ... TRIANGLEC’est aussi possible de créer un objet sfc à partir d’objets sfg de géométries différentes.
# GEOMETRIE sfc
point_multilinestring_sfc = st_sfc(point1, multilinestring1)
st_geometry_type(point_multilinestring_sfc)
#> [1] POINT MULTILINESTRING
#> 18 Levels: GEOMETRY POINT LINESTRING POLYGON MULTIPOINT ... TRIANGLEComme indiqué précédemment, les objets sfc peuvent également stocker de l’information sur le système de coordonnées et de référence (CRS).
La valeur par défaut est NA (Not Available) et elle peut être vérifiée avec st_crs() :
st_crs(points_sfc)
#> Coordinate Reference System: NAToutes les géométries des objets sfc doivent avoir le même SCR.
Un SCR peut être spécifié avec l’argument crs de st_sfc() (ou st_sf()), il prend un identifiant CRS fourni sous forme de chaîne de texte, comme crs = "EPSG:4326" (voir la section 7.2 pour détails et mieux comprendre ce que cela signifie)
2.2.8 le paquet sfheaders
sfheaders est un paquet pour R qui accélère la construction, la conversion et la manipulation d’objets sf (Cooley 2020).
Il se focalise sur la construction rapide d’objets sf à partir de vecteurs, matrices et tableaux de données, sans dépendre de la bibliothèque sf ; en exposant son code C++ sous-jacent à travers des fichiers d’en-tête (d’où le nom, sfheaders).
Cette approche permet à d’autres de l’étendre en utilisant un code compilé et rapide.
Chaque fonction de base de sfheaders a une implémentation C++ correspondante, comme décrit dans la vignette Cpp.
Pour la plupart des gens, les fonctions R seront plus que suffisantes pour bénéficier de la vitesse de calcul du paquet.
sfheaders a été développé séparément de sf, mais vise à être totalement compatible, en créant des objets sf valides du type décrit dans les sections précédentes.
Les cas le plus simple d’utilisation de sfheaders sont présentés dans les morceaux de code ci-dessous avec des exemples de construction d’objets sfg, sfc, et sf :
- un vecteur converti en
sfg_POINT; - une matrice convertie en
sfg_LINESTRING; - un tableau de données converti en
sfg_POLYGON.
Nous allons commencer par créer l’objet sfg le plus simple possible, une seule paire de coordonnées, assignée à un vecteur nommé v :
v_sfg_sfh # affichage sans sf chargé
#> [,1] [,2]
#> [1,] 1 1
#> attr(,"class")
#> [1] "XY" "POINT" "sfg" L’exemple ci-dessus montre comment l’objet sfg v_sfg_sfh est affiché lorsque sf n’est pas chargé, démontrant ainsi sa structure sous-jacente.
Lorsque sf est chargé (comme c’est le cas ici), le résultat de la commande ci-dessus est indiscernable des objets sf :
v_sfg_sf = sf::st_point(v)
print(v_sfg_sf) == print(v_sfg_sfh)
#> POINT (1 1)
#> POINT (1 1)
#> [1] TRUELes exemples suivants montrent comment sfheaders crée des objets sfg à partir de matrices et de tableaux de données :
# matrices
m = matrix(1:8, ncol = 2)
sfheaders::sfg_linestring(obj = m)
#> LINESTRING (1 5, 2 6, 3 7, 4 8)
# data.frames
df = data.frame(x = 1:4, y = 4:1)
sfheaders::sfg_polygon(obj = df)
#> POLYGON ((1 4, 2 3, 3 2, 4 1, 1 4))En réutilisant les objets v, m, et df, nous pouvons également construire des colonnes de géométrie simple feature (sfc) comme suit (sorties non montrées) :
sfheaders::sfc_point(obj = v)
sfheaders::sfc_linestring(obj = m)
sfheaders::sfc_polygon(obj = df)De même, les objets sf sont crées comme suis:
sfheaders::sf_point(obj = v)
sfheaders::sf_linestring(obj = m)
sfheaders::sf_polygon(obj = df)Dans chacun de ces exemples, le SCR (système de coordonnées et de référence) n’est pas défini. Si vous prévoyez d’effectuer des calculs ou des opérations géométriques à l’aide des fonctions sf, nous vous recommandons de définir le CRS (voir le chapitre 7 pour plus de détails) :
df_sf = sfheaders::sf_polygon(obj = df)
st_crs(df_sf) = "EPSG:4326"sfheaders est aussi une bonne option pour “déconstruire” et “reconstruire” les objets sf, c’est-à-dire convertir les colonnes géométriques en tableaux de données contenant les coordonnées de chaque sommet (vertex) et les identifiants de chaque éléments géométriques (et d’éventuels géométrie multiples).
Il est rapide et fiable pour “passer” des colonnes géométriques vers différents types, un sujet traité dans le chapitre ??.
Des tests, dans la documentation du paquet et dans le code de test développé pour ce livre, montrent qu’il est beaucoup plus rapide que le paquet sf pour de telles opérations.
2.2.9 géométrie sphérique avec S2
Les moteurs de géométrie sphérique sont basés sur le fait que la terre est ronde alors que les procédures mathématiques simples de géocomputation, telles que le calcul d’une ligne droite entre deux points ou de l’aire délimitée par un polygone, supposent des géométries planes (projetées). Depuis la version 1.0.0 de sf, R prend en charge les opérations de géométrie sphérique “d’emblée”, grâce à son interface avec le moteur de géométrie sphérique S2 de Google, via le paquet l’interfaçant s2. S2 est peut-être mieux connu comme un exemple de système de grille globale discrète (DGGS). Un autre exemple est l’indice spatial hiérarchique hexagonal global H3 (Bondaruk, Roberts, and Robertson 2020).
Bien que potentiellement utile pour décrire des lieux n’importe où sur la Terre en utilisant des chaînes de caractères telles que e66ef376f790adf8a5af7fca9e6e422c03c9143f, le principal avantage de l’interface de sf avec S2 est l’intégration de fonctions de calculs tels que les calculs de distance, de tampon (buffer) et de surface. Ils sont décrit dans la documentation intégrée de sf qui peut être ouverte avec la commande vignette("sf7").
sf peut fonctionner sur deux modes par rapport à S2 : activé et désactivé. Par défaut, le moteur de géométrie S2 est activé, comme on peut le vérifier avec la commande suivante :
sf_use_s2()
#> [1] TRUEUn exemple des conséquences de la désactivation du moteur de géométrie est montré ci-dessous, en créant des tampons autour de l’objet india créé plus tôt dans le chapitre (notez les avertissements émis lorsque S2 est désactivé)
india_buffer_with_s2 = st_buffer(india, 1)
sf_use_s2(FALSE)
#> Spherical geometry (s2) switched off
india_buffer_without_s2 = st_buffer(india, 1)
#> Warning in st_buffer.sfc(st_geometry(x), dist, nQuadSegs, endCapStyle =
#> endCapStyle, : st_buffer does not correctly buffer longitude/latitude data
#> dist is assumed to be in decimal degrees (arc_degrees).#>
#> Attachement du package : 'tmap'
#> L'objet suivant est masqué depuis 'package:datasets':
#>
#> rivers
#> [v3->v4] tm_layout(): use 'tm_title()' instead of the 'title' argument of 'tm_layout'
#> Warning: The 'main.title' argument of 'tm_layout()' is deprecated as of tmap
#> 4.0. Please use 'tm_title()' instead.
#> [v3->v4] tm_layout(): use 'tm_title()' instead of the 'title' argument of 'tm_layout'
#> Warning: The 'main.title' argument of 'tm_layout()' is deprecated as of tmap
#> 4.0. Please use 'tm_title()' instead.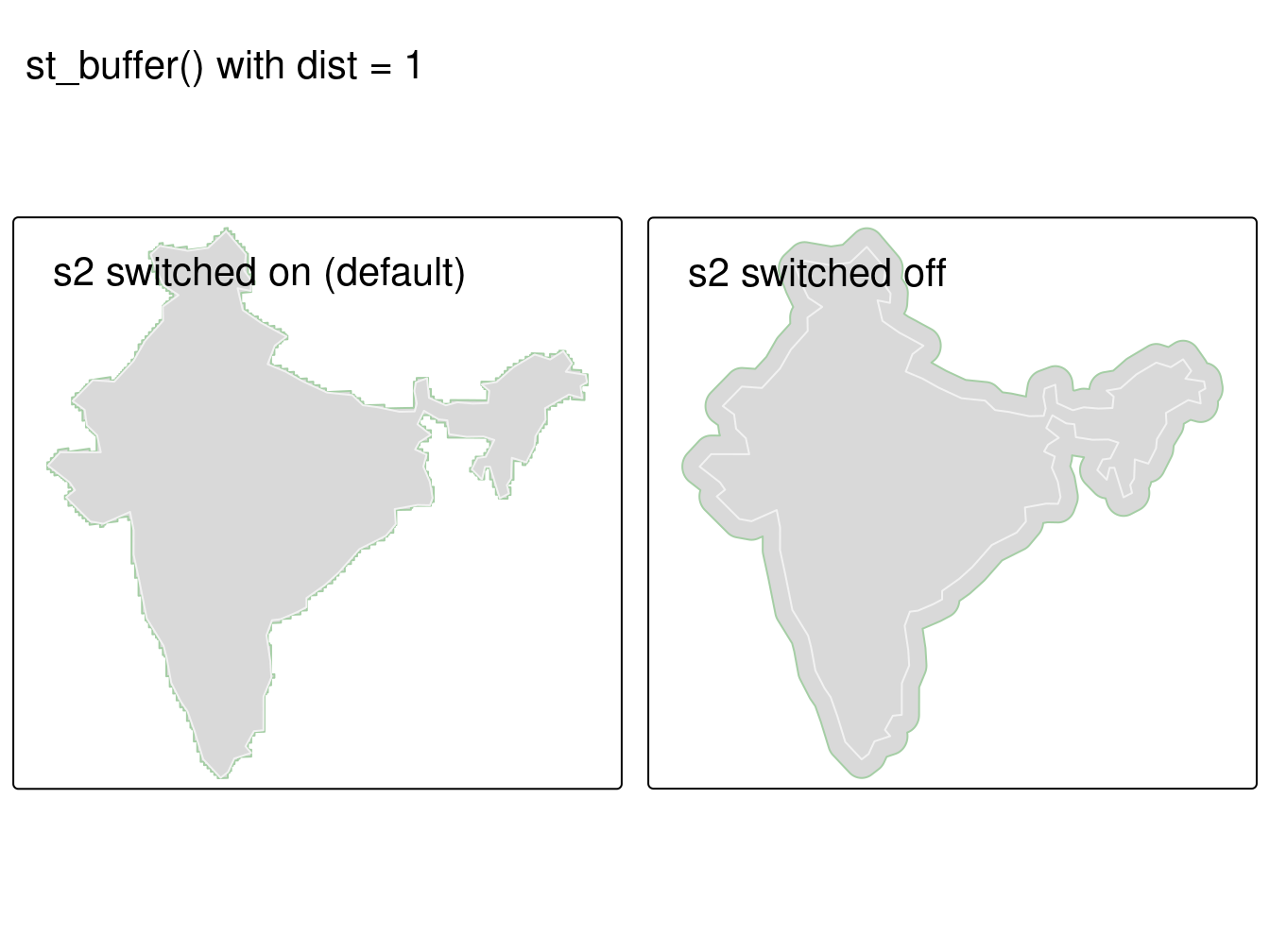
FIGURE 2.11: Exemple des conséquences de la désactivation du moteur géométrique S2. Les deux représentations d’un tampon autour de l’Inde ont été créées avec la même commande, mais l’objet polygone violet a été créé avec S2 activé, ce qui a donné un tampon de 1 m. Le polygone vert clair, plus grand, a été créé avec S2 désactivé, ce qui a donné un tampon inexacte avec des degrés en longitude/latitude.
Dans ce livre, nous supposerons que S2 est activé, sauf indication contraire. Activez-le à nouveau avec la commande suivante.
sf_use_s2(TRUE)
#> Spherical geometry (s2) switched on#> Error in s2_geography_from_wkb ..., il peut être utile de réessayer la commande qui a généré le message d´erreur, après avoir désactivé S2.
Pour désactiver S2 pour la totalité d´un projet, vous pouvez créer un fichier appelé .Rprofile dans le répertoire racine (le dossier principal) de votre projet contenant la commande sf::sf_use_s2(FALSE).
2.3 Les données raster
Le modèle de données raster représente le monde à l’aide d’une grille continue de cellules (souvent aussi appelées pixels ; Figure 2.12:A). Ce modèle de données fait souvent référence à des grilles dites régulières, dans lesquelles chaque cellule a une taille identique et constante - et nous nous concentrerons uniquement sur les grilles régulières dans cet ouvrage. Cependant, plusieurs autres types de grilles existent, notamment les grilles tournées, cisaillées, rectilignes et curvilignes (voir le chapitre 1 de Pebesma and Bivand (2022) ou le chapitre 2 de Tennekes and Nowosad (2022)).
Un raster se compose généralement d’un en-tête et d’une matrice (avec des lignes et des colonnes) représentant des cellules équidistantes (souvent aussi nommées pixels; Figure 2.12:A).)15 L’en-tête du raster définit le système de coordonnées de référence, l’étendue et l’origine. L’origine (ou point de départ) est souvent la coordonnée du coin inférieur gauche de la matrice (le paquet terra utilise toutefois le coin supérieur gauche, par défaut (Figure 2.12:B)). L’en-tête définit l’étendue via le nombre de colonnes, le nombre de lignes et la résolution de la taille des cellules. Ainsi, en partant de l’origine, nous pouvons facilement accéder à chaque cellule et la modifier, soit en utilisant l’ID d’une cellule (Figure 2.12:B), soit en spécifiant explicitement les lignes et les colonnes. Cette représentation matricielle évite de stocker explicitement les coordonnées des quatre points d’angle (en fait, elle ne stocke qu’une seule coordonnée, à savoir l’origine) de chaque coin de cellule, comme ce serait le cas pour les polygones vectoriels rectangulaires. Grâce à cela et à l’algèbre raster (section ??), le traitement raster est beaucoup plus efficace et rapide que le traitement des données vectorielles. Cependant, contrairement aux données vectorielles, la cellule d’une couche raster ne peut contenir qu’une seule valeur. Cette valeur peut être numérique ou catégorique (Figure 2.12:C).
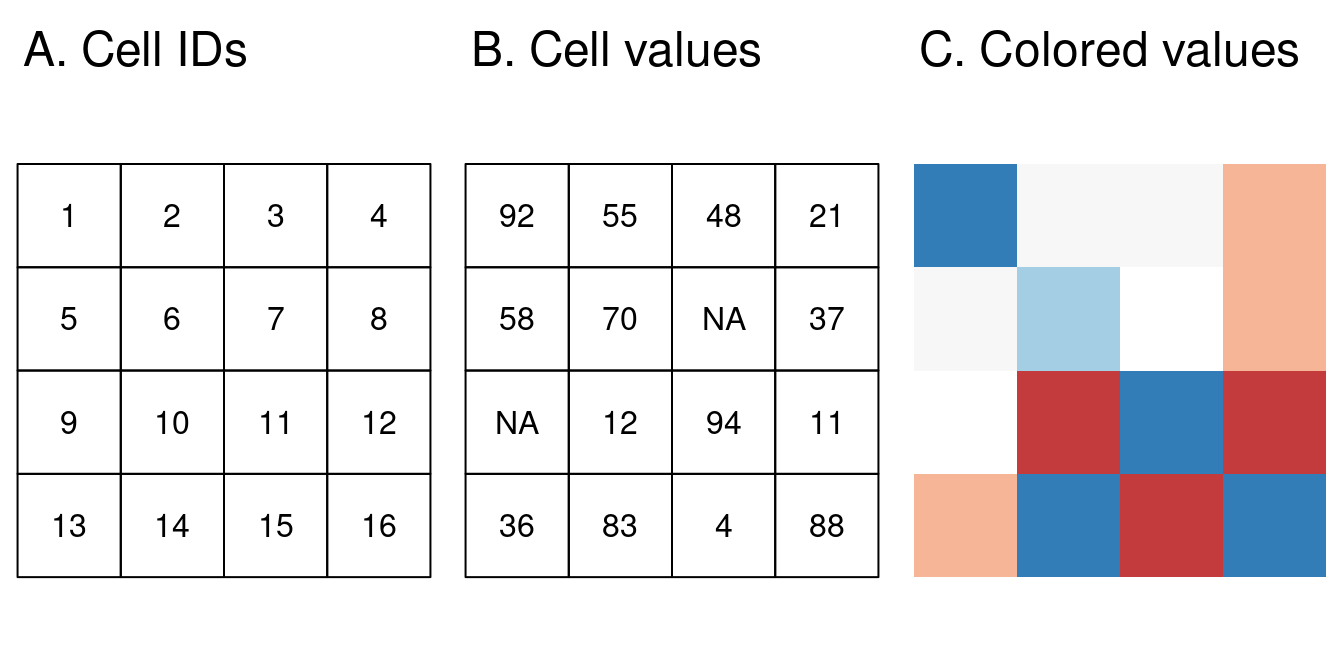
FIGURE 2.12: Le modèle des données raster: (A) identifiant des pixels, (B) valeur des pixels, (C) une carte raster colorisée.
Les rasters représentent généralement des phénomènes continus tels que l’altitude, la température, la densité de population ou des données spectrales. Les variables discrètes telles que la classification des sols ou les typologies d’occupation des sols peuvent également être représentées dans le modèle de données raster. Ces deux utilisations sont illustrées dans la figure 2.13 qui montre que les limites des caractéristiques discrètes peuvent devenir floues dans les ensembles de données matricielles. Selon la nature de l’application, les représentations vectorielles des caractéristiques discrètes peuvent être plus adaptées.
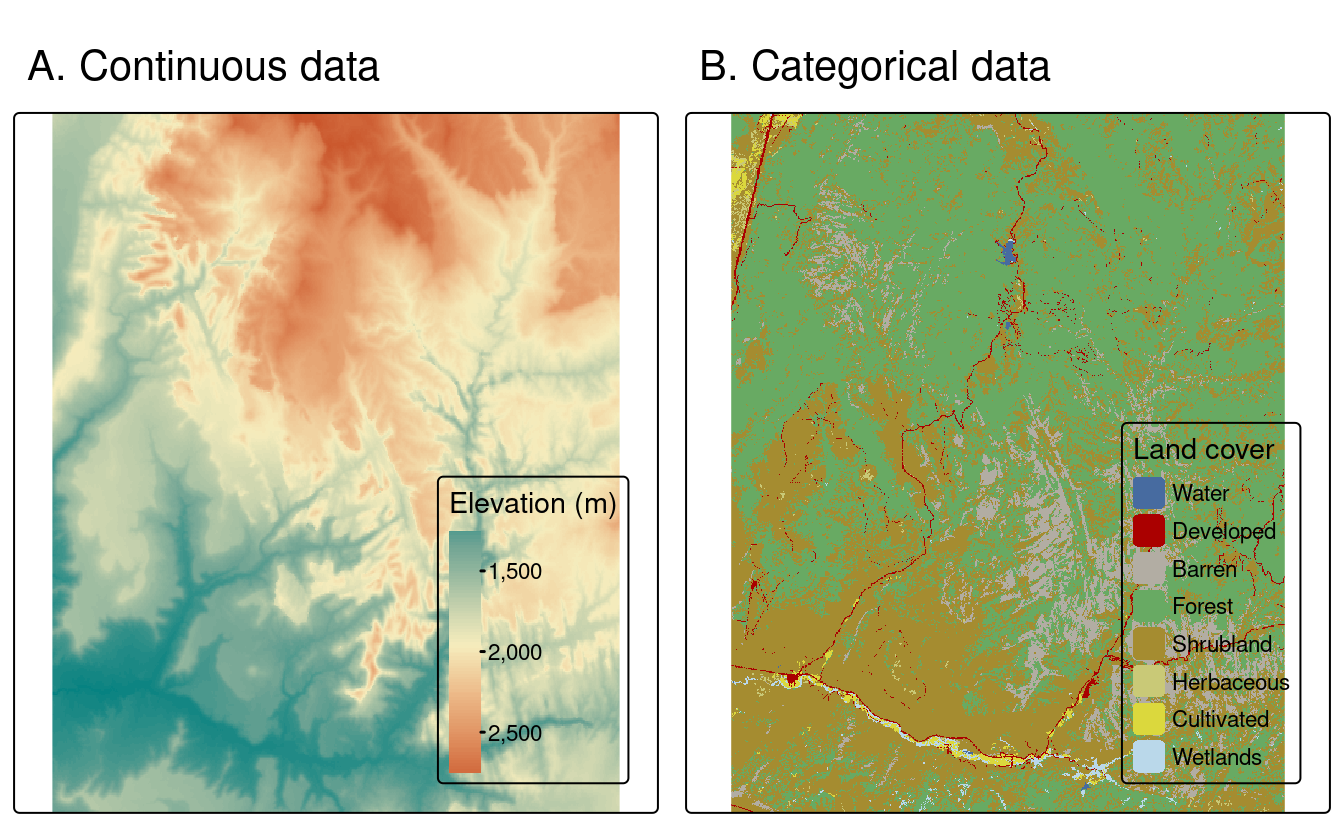
FIGURE 2.13: Exemples de rasters pour des variables continues et catégorielles.
2.3.1 Les paquets de R pour travailler avec des rasters
Au cours des deux dernières décennies, plusieurs paquets permettant de lire et de traiter des ensembles de données matricielles ont été développés. Comme indiqué dans la section 1.5, le principal d’entre eux était raster. Il a conduit à un changement radical dans les capacités de traitement des rasters avec R lorsqu’il a été lancé en 2010 et il a dominé ce segment jusqu’au développement de terra et stars. Développés plus récemment, ces deux paquets offrent des fonctions puissantes et performantes pour travailler avec des jeux de données raster et ils offrent de nombreuses fonctionnalités communes. Dans ce livre, nous nous concentrons sur terra, qui remplace raster, plus ancien et (dans la plupart des cas) plus lent. Avant de découvrir le fonctionnement du système de classes de terra, cette section décrit les similitudes et les différences entre terra et stars ; ces connaissances aideront à décider lequel est le plus approprié dans différentes situations.
Tout d’abord, terra se concentre sur le modèle de données raster le plus courant (grilles régulières), tandis que stars permet également de stocker des modèles moins populaires (notamment des grilles régulières, tournées, cisaillées, rectilignes et curvilignes).
Alors que terra gère généralement des rasters à une ou plusieurs couches16, le paquet stars fournit des moyens de stocker des cubes de données raster – un objet raster avec de nombreuses couches (par exemple, des bandes), pour plusieurs points dans le temps (par exemple, chaque mois), et de nombreux attributs (par exemple, le type de capteur A et le type de capteur B).
Premièrement, il est important de noter que dans les deux paquets, toutes les couches ou éléments d’un cube de données doivent avoir les mêmes dimensions spatiales et la même étendue.
Deuxièmement, les deux paquets permettent soit de lire toutes les données raster en mémoire, soit de lire uniquement leurs métadonnées, ce qui est généralement effectué automatiquement en fonction de la taille du fichier d’entrée.
Cependant, ils stockent différement les valeurs associées aux cellules.
terra est basé sur du code C++ et utilise principalement des pointeurs C++.
stars stocke les valeurs sous forme de listes de tableaux pour les plus petits rasters ou juste un chemin de fichier pour les plus grands.
Troisièmement, les fonctions de stars sont étroitement liées aux objets et fonctions vectorielles de sf, alors que terra utilise sa propre classe d’objets pour les données vectorielles, à savoir SpatVector.
Quatrièmement, les deux paquets approchent différemment la façon dont leurs fonctions agissent sur leurs objets.
Le paquet terra s’appuie principalement sur un grand nombre de fonctions intégrées, où chaque fonction a un but spécifique (par exemple, le rééchantillonnage ou le recadrage).
De son coté stars propose quelques fonctions intégrées (généralement avec des noms commençant par st_) mais a aussi ses propres méthodes pour les fonctions de R (par exemple, split() ou aggregate()) et celles de dplyr (par exemple, filter() ou slice()).
Il est important de noter qu’il est facile de convertir des objets de terra en stars (en utilisant st_as_stars()) et inversement (en utilisant rast()).
Nous vous encourageons également à lire Pebesma and Bivand (2022) pour l’introduction la plus complète au paquet stars.
2.3.2 Une introduction à terra
Le paquet terra prend en charge les objets raster dans R.
Comme son prédécesseur raster (créé par le même développeur, Robert Hijmans), il fournit un ensemble complet de fonctions pour créer, lire, exporter, manipuler et traiter des jeux de données rasters.
Les fonctionnalités de terra sont en grande partie les mêmes que celles de raster, plus mature, mais il existe quelques différences : les fonctions terra sont généralement plus efficientes en calcul que leurs équivalents raster.
D’autre part, le système de classes de raster est populaire et utilisé par de nombreux autres paquets.
Vous pouvez passer sans problème d’un type d’objet à l’autre pour assurer la compatibilité avec les anciens scripts et paquets, par exemple avec les fonctions raster(), stack() et brick() du paquet raster (cf. le chapitre précédent pour en savoir plus sur l’évolution des paquets R pour travailler avec des données géographiques).
En plus des fonctions de manipulation des données matricielles, terra fournit de nombreuses fonctions de bas niveau pouvant servir de base au développement de nouveaux outils pour travailler avec des jeux de données raster. terra vous permet également de travailler sur de grands jeux de données raster qui sont trop volumineux pour tenir dans la RAM. Dans ce cas, terra offre la possibilité de diviser l’image raster en petits morceaux et de les traiter de manière itérative au lieu de charger un fichier entier dans la RAM.
Pour l’illustration des concepts terra, nous utiliserons des jeux de données de spDataLarge.
Il s’agit de quelques objets raster et d’un objet vectoriel couvrant une zone du parc national de Zion (Utah, USA).
Par exemple, srtm.tif est un modèle numérique de terrain de cette zone (pour plus de détails, voir sa documentation ?srtm).
Tout d’abord, créons un objet SpatRaster nommé my_rast :
raster_filepath = system.file("raster/srtm.tif", package = "spDataLarge")
my_rast = rast(raster_filepath)
class(my_rast)
#> [1] "SpatRaster"
#> attr(,"package")
#> [1] "terra"En tapant le nom du raster dans la console, on obtient l’en-tête du raster (dimensions, résolution, étendue, CRS) et quelques informations supplémentaires (classe, source de données, résumé des valeurs du raster) :
my_rast
#> class : SpatRaster
#> dimensions : 457, 465, 1 (nrow, ncol, nlyr)
#> resolution : 0.000833, 0.000833 (x, y)
#> extent : -113, -113, 37.1, 37.5 (xmin, xmax, ymin, ymax)
#> coord. ref. : lon/lat WGS 84 (EPSG:4326)
#> source : srtm.tif
#> name : srtm
#> min value : 1024
#> max value : 2892Des fonctions dédiées renseignent sur chaque composant : dim() renvoie le nombre de lignes, de colonnes et de couches ; ncell() le nombre de cellules (pixels) ; res() la résolution spatiale ; ext() son étendue spatiale ; et crs() son système de coordonnées de référence (la reprojection de raster est traitée dans la section 7.8).
inMemory() indique si le raster est stocké en mémoire vive ou sur disque.
help("terra-package") renvoie une liste complète de toutes les fonctions terra disponibles.
2.3.3 Réalisation de cartes de base
Comme le paquet sf, terra fournit également des méthodes plot() pour ses propres classes.
plot(my_rast)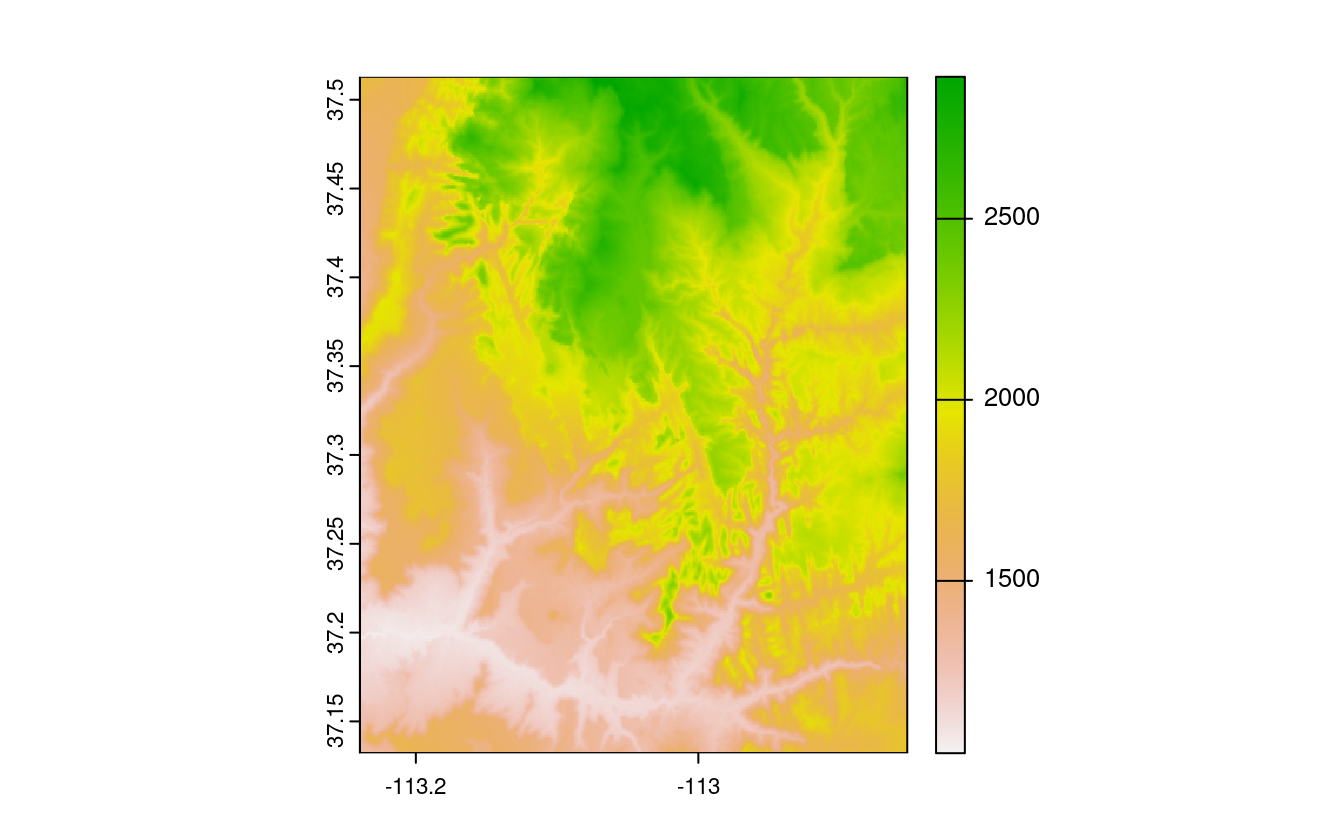
FIGURE 2.14: Une représentation raster basique.
Il existe plusieurs autres approches pour représenter des données raster dans R qui sortent du cadre de cette section, notamment :
- la fonction
plotRGB()du paquet terra pour créer une composition colorée rouge-vert-bleu (RGB) basée sur trois couches dans un objetSpatRaster; - des paquets tels que tmap pour créer des cartes statiques et interactives d’objets rasters et vectoriels (voir le chapitre ??) ;
- d’autres fonctions, par exemple
levelplot()du paquet rasterVis, pour créer des vignettes, une technique courante pour visualiser les changements dans le temps.
2.3.4 Les classes raster
La classe SpatRaster représente les rasters dans terra.
La façon la plus simple de créer un objet raster dans R est de lire un fichier raster à partir du disque ou d’un serveur (Section ??.
single_raster_file = system.file("raster/srtm.tif", package = "spDataLarge")
single_rast = rast(raster_filepath)Le paquet terra supporte de nombreux pilotes grâce à la bibliothèque GDAL. Les rasters provenant de fichiers ne sont généralement pas lus entièrement en RAM, à l’exception de leur en-tête et d’un pointeur vers le fichier lui-même.
Les rasters peuvent aussi être créés à partir de zéro en utilisant la même fonction rast().
Ceci est illustré dans l’extrait de code suivant créant un nouvel objet SpatRaster.
Ce raster consiste en 36 cellules (6 colonnes et 6 lignes spécifiées par nrows et ncols) centrées autour du Méridien d’origine et de l’Équateur (voir les paramètres xmin, xmax, ymin et ymax).
Le SCR par défaut des objets rasters est WGS84, mais peut être changé avec l’argument crs.
Cela signifie que l’unité de résolution est en degrés, que nous fixons à 0.5 (resolution).
Des valeurs (vals) sont assignées à chaque cellule : 1 à la cellule 1, 2 à la cellule 2, et ainsi de suite.
Rappelez-vous : rast() remplit les cellules par ligne (contrairement à matrix()) en commençant par le coin supérieur gauche, ce qui signifie que la première ligne contient les valeurs 1 à 6, la seconde 7 à 12, etc.
new_raster = rast(nrows = 6, ncols = 6, resolution = 0.5,
xmin = -1.5, xmax = 1.5, ymin = -1.5, ymax = 1.5,
vals = 1:36)?rast permet de découvrir d’autre façons de créer des objets rasters.
La classe SpatRaster gère également les couches multiples, qui correspondent généralement à un seul fichier satellite multispectral ou à une série temporelle de rasters.
multi_raster_file = system.file("raster/landsat.tif", package = "spDataLarge")
multi_rast = rast(multi_raster_file)
multi_rast
#> class : SpatRaster
#> dimensions : 1428, 1128, 4 (nrow, ncol, nlyr)
#> resolution : 30, 30 (x, y)
#> extent : 301905, 335745, 4111245, 4154085 (xmin, xmax, ymin, ymax)
#> coord. ref. : WGS 84 / UTM zone 12N (EPSG:32612)
#> source : landsat.tif
#> names : landsat_1, landsat_2, landsat_3, landsat_4
#> min values : 7550, 6404, 5678, 5252
#> max values : 19071, 22051, 25780, 31961nlyr() fournit le nombre de couches stockées dans un objet SpatRaster :
nlyr(multi_rast)
#> [1] 4Pour les objets raster multi-couches, les couches peuvent être sélectionnées avec terra::subset()17
qui accepte un numéro ou un nom de couche comme second argument :
L’opération inverse, qui consiste à combiner plusieurs objets SpatRaster en un seul, peut être réalisée à l’aide de la fonction c :
multi_rast34 = c(multi_rast3, multi_rast4)SpatRaster ne stockent pas des rasters, mais plutôt un pointeur vers le fichier lui-même.
Cela a un effet secondaire important : ils ne peuvent pas être directement sauvegardés dans des fichiers ".rds" ou ".rda" ou utilisés dans le calcul en grappe.
Dans ces cas, il y a deux solutions possibles : (1) l´utilisation de la fonction wrap() qui crée un type spécial d´objet temporaire qui peut être sauvegardé comme un objet R ou utilisé dans des grappe de serveurs, ou (2) sauvegarder l´objet comme un raster régulier avec writeRaster().
2.4 Les systèmes de référence des coordonnées
Les types de données spatiales vectorielles et rasters partagent des concepts intrinsèques aux données spatiales. Le plus fondamental d’entre eux est peut-être le système de référence des coordonnées (CRS), qui définit la manière dont les éléments spatiaux des données se rapportent à la surface de la Terre (ou d’autres corps). Les CRS sont soit géographiques, soit projetés, comme nous l’avons présenté au début de ce chapitre (voir Figure 2.1). Cette section reprend chaque type, posant ainsi les bases du chapitre 7, qui offre une plongée en profondeur dans la configuration, la transformation et l’interrogation des SCR.
2.4.1 Les systèmes de coordonnées géographiques
Les systèmes de coordonnées géographiques identifient tout emplacement sur la surface de la Terre à l’aide de deux valeurs — la longitude et la latitude (voir le panneau gauche de la figure 2.16). La longitude est la position dans la direction est-ouest en distance angulaire par rapport au plan du méridien d’origine. La latitude est la distance angulaire au nord ou au sud du plan équatorial. Les distances dans les SCR géographiques ne sont donc pas mesurées en mètres. Cela a des conséquences importantes, comme le montre la section 7.
La surface de la Terre dans les systèmes de coordonnées géographiques est représentée par une surface sphérique ou ellipsoïdale. Les modèles sphériques supposent que la Terre est une sphère parfaite d’un rayon donné. Ils ont l’avantage de la simplicité mais, en même temps, ils sont inexacts : la Terre n’est pas une sphère ! Les modèles ellipsoïdaux sont définis par deux paramètres : le rayon équatorial et le rayon polaire. Ils sont adaptés car la Terre est comprimée : le rayon équatorial est environ 11,5 km plus long que le rayon polaire (Maling 1992).18
Les ellipsoïdes font partie d’un composant plus large des CRS : le datum.
Il contient des informations sur l’ellipsoïde à utiliser et la relation précise entre les coordonnées cartésiennes et l’emplacement sur la surface de la Terre.
Il existe deux types de datum — géocentrique (tel que WGS84) et local (tel que NAD83).
Vous pouvez voir des exemples de ces deux types de référentiels dans la figure 2.15.
Les lignes noires représentent un * datum géocentrique, dont le centre est situé au centre de gravité de la Terre et n’est pas optimisé pour un emplacement spécifique.
Dans un datum référentiel*, représenté par une ligne pointillée violette, la surface ellipsoïdale est décalée pour s’aligner sur la surface à un endroit particulier.
Cela permet de prendre en compte les variations locales de la surface de la Terre, dues par exemple à de grandes chaînes de montagnes, dans un SCR local.
On peut le voir sur la figure 2.15, où le système de référence local est adapté à la région des Philippines, mais n’est pas aligné avec la majeure partie du reste de la surface de la planète.
Les deux référentiels de la figure 2.15 sont placés au-dessus d’un géoïde - un modèle du niveau moyen des mers à l’échelle mondiale 19.
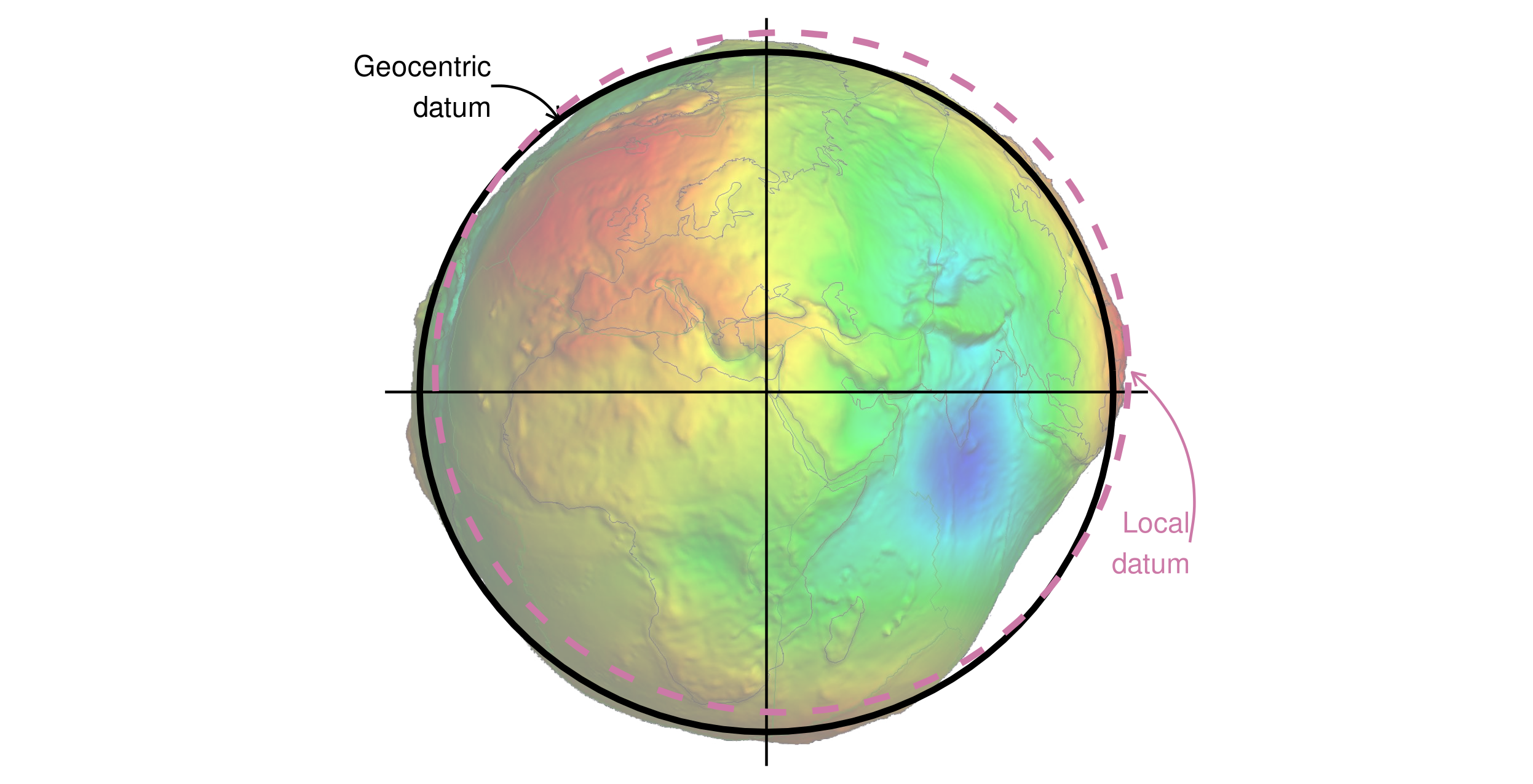
FIGURE 2.15: Données géocentriques et géodésiques locales représentées sur un géoïde (en fausses couleurs et avec un facteur d’échelle de 10 000 pour l’exagération verticale). L’image du géoïde est adaptée du travail de Ince et al. (2019).
2.4.2 Les systèmes de coordonnées projetés
Tous les CRS projetés sont basés sur un CRS géographique, décrit dans la section précédente, et s’appuient sur des projections cartographiques pour convertir la surface tridimensionnelle de la Terre en valeurs d’abscisses et d’ordonnées (x et y) dans un CRS projeté. Les CRS projetés reposent sur des coordonnées cartésiennes sur une surface implicitement plane (panneau de droite de la figure 2.16). Ils ont une origine, des axes x et y, et une unité de mesure linéaire telle que le mètre.
Cette transition ne peut se faire sans ajouter certaines déformations. Par conséquent, certaines propriétés de la surface de la Terre sont déformées au cours de ce processus, telles que la superficie, la direction, la distance et la forme. Un système de coordonnées projeté ne peut préserver qu’une ou deux de ces propriétés. Les projections sont souvent nommées en fonction de la propriété qu’elles préservent : la projection de surface égale préserve l’aire, la projection azimutale préserve la direction, la projection équidistante préserve la distance et la projection conforme préserve la forme locale.
Il existe trois groupes principaux de types de projection : conique, cylindrique et plane (azimutale).
Dans une projection conique, la surface de la Terre est projetée sur un cône le long d’une seule ligne de tangence ou de deux lignes de tangence.
Les distorsions sont minimisées le long des lignes de tangence et augmentent avec la distance à ces lignes dans cette projection.
Elle est donc mieux adaptée aux cartes des zones de latitude moyenne.
Une projection cylindrique représente la surface sur un cylindre.
Cette projection peut également être créée en plaçant la surface de la Terre le long d’une seule ligne de tangence ou de deux lignes de tangence.
Les projections cylindriques sont le plus souvent utilisées pour cartographier le monde entier.
Une projection plane projette les données sur une surface plate en touchant le globe en un point ou le long d’une ligne de tangence.
Elle est généralement utilisée pour cartographier les régions polaires.
sf_proj_info(type = "proj") donne une liste des projections disponibles supportées par la bibliothèque PROJ.
Un résumé rapide des différentes projections, de leurs types, de leurs propriétés et de leur adéquation peut être trouvé dans “Map Projections” (1993) et sur https://www.geo-projections.com/. Nous nous étendrons sur les CRS et expliquerons comment projeter d’un SCR à un autre dans le chapitre 7. Pour l’instant, il suffit de savoir :
- Les systèmes de coordonnées sont un élément clé des objets géographiques.
- Il est important de savoir dans quel CRS se trouvent vos données, et s’il s’agit d’un système géographique (lon/lat) ou d’un système projeté (généralement en mètres), car cela a des conséquences sur la façon dont R gère les opérations spatiales et géométriques.
- Les CRS des objets
sfpeuvent être interrogés avec la fonctionst_crs(), les CRS des objetsterrapeuvent être interrogés avec la fonctioncrs().
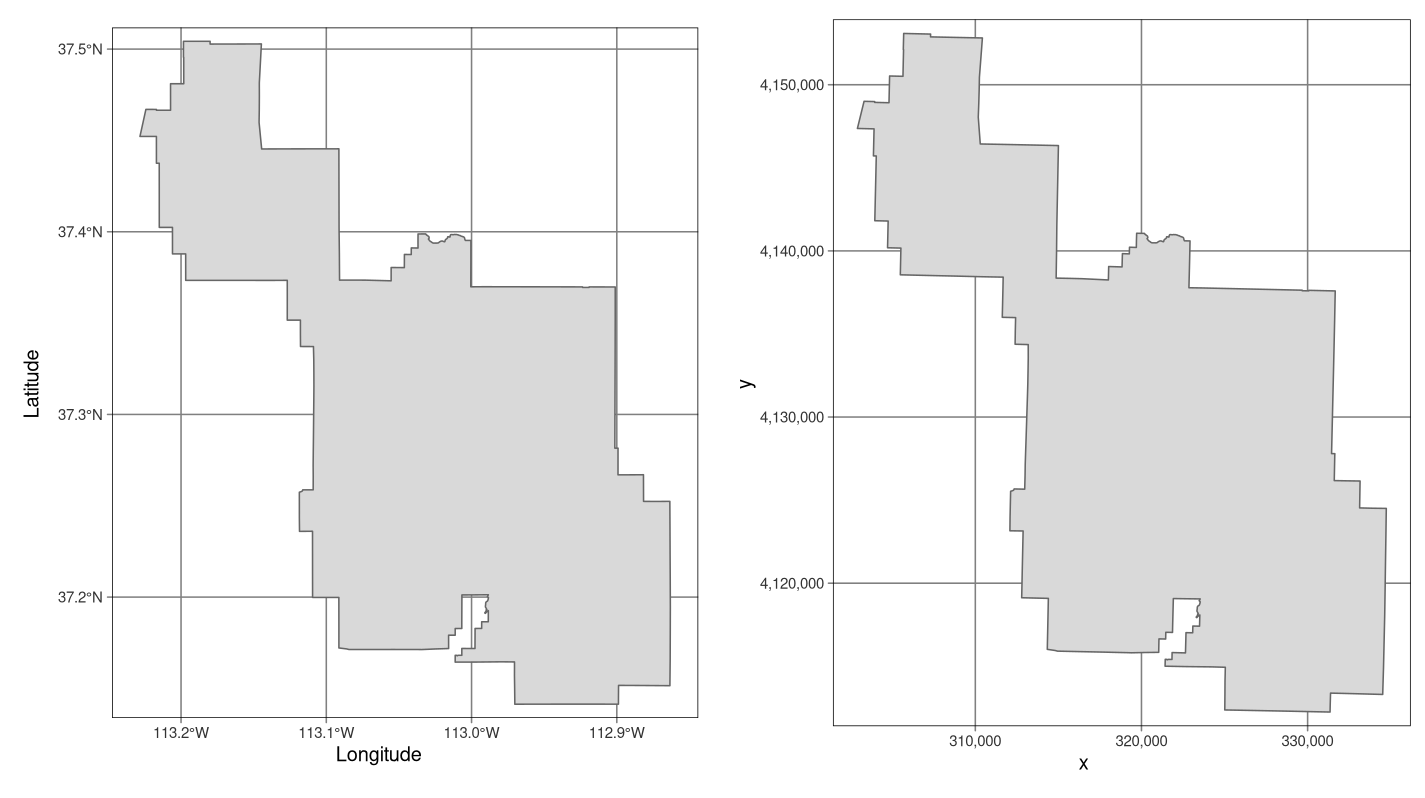
FIGURE 2.16: Exemples de systèmes de coordonnées géographiques (WGS 84 ; à gauche) et projetées (NAD83 / UTM zone 12N ; à droite) pour un type de données vectorielles.
2.5 Unités
Une caractéristique importante des SCR est qu’ils contiennent des informations sur les unités spatiales. De toute évidence, il est essentiel de savoir si les mesures d’une maison sont en pieds ou en mètres, et il en va de même pour les cartes. Il est de bonne pratique cartographique d’ajouter une barre d’échelle ou un autre indicateur de distance sur les cartes afin de démontrer la relation entre les distances sur la page ou l’écran et les distances sur le terrain. De même, il est important de spécifier formellement les unités dans lesquelles les données géométriques ou les cellules sont mesurées afin de fournir un contexte et de garantir que les calculs ultérieurs sont effectués dans ce contexte.
Une nouvelle caractéristique des données géométriques dans les objets sf est qu’elles ont un support natif pour les unités.
Cela signifie que les calculs de distance, de surface et autres calculs géométriques dans sf renvoient des valeurs accompagnées d’un attribut units, défini par le paquet units (Pebesma, Mailund, and Hiebert 2016).
Ceci est avantageux, car cela évite la confusion causée par les différentes unités (la plupart des SCR utilisent les mètres, certains les pieds) et fournit des informations sur la dimensionnalité.
Ceci est démontré dans le morceau de code ci-dessous, qui calcule la superficie du Luxembourg :
luxembourg = world[world$name_long == "Luxembourg", ]
st_area(luxembourg) # nécessite le paquet s2 des récentes version de sf
#> 2.41e+09 [m^2]La sortie est en unités de mètres carrés (m2), montrant que le résultat représente un espace bidimensionnel.
Cette information, stockée sous forme d’attribut (que les lecteurs intéressés peuvent découvrir avec attributs(st_area(luxembourg))), peut alimenter des calculs ultérieurs qui utilisent des unités, comme la densité de population (nombre de personnes par unité de surface, typiquement par km2).
Le fait de déclarer les unités permet d’éviter toute confusion.
Pour reprendre l’exemple du Luxembourg, si les unités n’étaient pas précisées, on pourrait supposer à tort que les unités sont en hectares.
Pour traduire ce chiffre énorme en une taille plus digeste, il est tentant de diviser les résultats par un million (le nombre de mètres carrés dans un kilomètre carré)
st_area(luxembourg) / 1000000
#> 2409 [m^2]Cependant, le résultat est alors donné de manière incorrecte en mètres carrés. La solution consiste à définir les unités correctes avec le paquet units :
Les unités sont tout aussi importantes dans le cas des jeux de données raster.
Cependant, jusqu’à présent, sf est le seul paquet spatial qui supporte les unités, ce qui signifie que les personnes travaillant sur des données raster doivent aborder les changements d’unités d’analyse (par exemple, la conversion de la largeur des pixels des unités impériales aux unités décimales) avec précaution.
L’objet my_rast (voir ci-dessus) utilise une projection WGS84 avec des degrés décimaux comme unités.
Par conséquent, sa résolution est également donnée en degrés décimaux, mais il faut le savoir, puisque la fonction res() renvoie simplement un vecteur numérique.
res(my_rast)
#> [1] 0.000833 0.000833Si nous utilisions la projection UTM, les unités changeraient.
Encore une fois, la commande res() renvoie un tableau numérique sans unité, ce qui nous oblige à savoir que l’unité de la projection UTM est le mètre.
2.6 Exercises
E1. Utilisez summary() sur la colonne géométrie de l’objet de données world qui est inclus dans le paquet spData. Qu’en déduisez vous sur :
- Son type de géométrie ?
- Le nombre de pays ?
- Son système de coordonnées et de référence (SCR) ?
E2. Exécutez le code qui a “généré” la carte du monde dans la section 2.2.3 (Création de cartes de base). Trouvez deux similitudes et deux différences entre l’image sur votre ordinateur et celle du livre.
- Que fait l’argument
cex(voir?plot) ? - Pourquoi le paramètre
cexa-t-il été fixé àsqrt(world$pop) / 10000? - Bonus : expérimentez différentes façons de visualiser la population mondiale.
E3. Utilisez plot() pour créer des cartes du Nigeria et les pays avoisinants (voir section 2.2.3).
- Ajustez les arguments
lwd,coletexpandBBdeplot(). - Défi! : lisez la documentation de
text()et annotez la carte.
E4. Créez un objet SpatRaster vide appelé mon_raster avec 10 colonnes et 10 lignes.
Attribuez des valeurs aléatoires entre 0 et 10 au nouveau raster et représentez-le.
E5. Lisez le fichier raster/nlcd.tif du paquet spDataLarge.
Quel type d’information pouvez-vous obtenir sur les propriétés de ce fichier ?
E6. Regardez le SCR du fichier raster/nlcd.tif du paquet spDataLarge.
Quel type d’information pouvez-vous en tirer ?